Active Disturbance Rejection Control of Output Voltage of Solid Oxide Fuel Cell Based on Reinforcement Learning
GUAN Chaojun1, LEI Zhengling1, HUO Haibo1, WANG Fang1, YAO Guoquan2, LIU Tao3
1.College of Engineering Science and Technology, Shanghai Ocean University, Pudong New District, Shanghai 201306, China
2.Key Laboratory of High Performance Ship Technology of the Ministry of Education (Wuhan University of Technology), Wuhan 430063, Hubei Province, China
3.College of Transport and Communications, Shanghai Maritime University, Pudong New District, Shanghai 201306, China
Objectives In order to improve the performance and lifetime of solid oxide fuel cell (SOFC) systems, the 100 kW SOFC system was taken as the research object. The continuous adjustment of the controller coefficients was explored through reinforcement learning to realize the best comprehensive performance, while ensuring the output voltage tracking performance. Methods A mechanism-based SOFC output voltage system model was established, an improved nonlinear active disturbance rejection controller (NLADRC) was used to make the output voltage track the reference value well by controlling the input gas flow. Conventional single-channel controllers can only satisfy one objective at a time, and dual-channel controllers will increase system complexity, cost and risk of failure. An improved NLADRC controller based on the twin delayed deep deterministic policy gradient (TD3) was proposed to optimize the coefficients of nonlinear error feedback control law. Results The designed controller can improve SOFC output voltage tracking performance without violating fuel utilization constraints. Conclusions The designed controller has the advantages of strong adaptability, high stability, and the ability to overcome uncertainty, providing theoretical reference for designing output voltage controllers in practical SOFC systems.
Keywords:solid oxide fuel cell (SOFC)
;
twin delayed deep deterministic policy gradient (TD3)
;
nonlinear active disturbance rejection control (NLADRC)
;
fuel utilization
;
nonlinear error feedback control law
;
output voltage tracking
;
uncertainty
GUAN Chaojun, LEI Zhengling, HUO Haibo, WANG Fang, YAO Guoquan, LIU Tao. Active Disturbance Rejection Control of Output Voltage of Solid Oxide Fuel Cell Based on Reinforcement Learning. Power Generation Technology[J], 2024, 45(6): 1163-1172 DOI:10.12096/j.2096-4528.pgt.24017
文献[11]提出SOFC的神经网络模型,采用神经模糊控制方法实现输出电压的精确控制,但因其采用单通道控制策略,使得燃料利用率约束未能满足。文献[12]采用改进萤火虫算法优化分数阶比例积分微分(proportional integral differential,PID)参数,算法优化后,PID控制器的抗干扰能力增强,提高了SOFC的运行可靠性,但其同样无法实现多约束目标。文献[13]采用一种由鲁棒控制器和PID控制器组成的多回路控制器,这种方法能实现在燃料利用约束前提下的稳定输出电压,但增加了系统的复杂性。文献[14]提出一种新的智能比例积分自适应滑动模态控制器(intelligent proportional integral adaptive sliding mode control,IPI-ASMC),并设计抗饱和补偿器,以处理不确定性和执行器饱和问题,但抗饱和控制器的存在限制了系统的动态性能。文献[15-16]采用了一种多智能体的控制方式,实现了电压的精确跟踪,满足了燃料利用率要求,但其控制结构复杂,存在优化失败的风险。
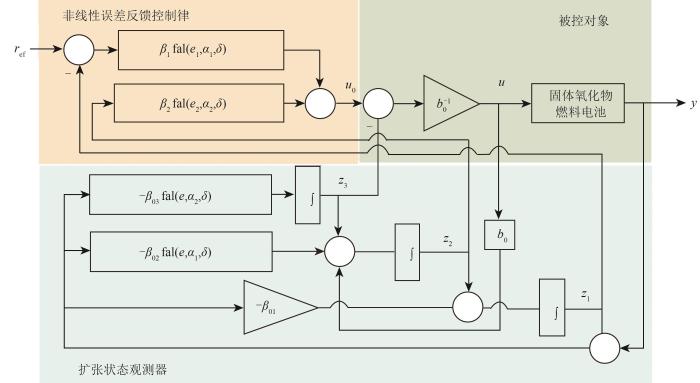
ADRC方法并不依赖于特定的模型,其主要结构由3部分组成:跟踪-微分器(tracking differentiator,TD)、非线性状态误差反馈控制律(nonlinear state error feedback,NLSEF)和非线性扩张状态观测器(nonlinear extended state observer,NLESO)。首先应用跟踪-微分器对输入的参考电压进行跟踪和滤波,然后应用非线性扩张状态观测器对SOFC系统的不确定性、未建模动态、外部扰动和控制系数的不确定性进行观测,最后将两者的输出信号输送至非线性误差反馈控制律中,经运算后得到天然气流量信号。
Voltage control of solid oxide fuel cell power plant based on intelligent proportional integral-adaptive sliding mode control with anti-windup compensator
[J].Transactions of the Institute of Measurement and Control,2020,42(1):116-130. doi:10.1177/0142331219867779
... 文献[11]提出SOFC的神经网络模型,采用神经模糊控制方法实现输出电压的精确控制,但因其采用单通道控制策略,使得燃料利用率约束未能满足.文献[12]采用改进萤火虫算法优化分数阶比例积分微分(proportional integral differential,PID)参数,算法优化后,PID控制器的抗干扰能力增强,提高了SOFC的运行可靠性,但其同样无法实现多约束目标.文献[13]采用一种由鲁棒控制器和PID控制器组成的多回路控制器,这种方法能实现在燃料利用约束前提下的稳定输出电压,但增加了系统的复杂性.文献[14]提出一种新的智能比例积分自适应滑动模态控制器(intelligent proportional integral adaptive sliding mode control,IPI-ASMC),并设计抗饱和补偿器,以处理不确定性和执行器饱和问题,但抗饱和控制器的存在限制了系统的动态性能.文献[15-16]采用了一种多智能体的控制方式,实现了电压的精确跟踪,满足了燃料利用率要求,但其控制结构复杂,存在优化失败的风险. ...
Study on neural fuzzy control strategy of solid oxide fuel cell
1
2022
... 文献[11]提出SOFC的神经网络模型,采用神经模糊控制方法实现输出电压的精确控制,但因其采用单通道控制策略,使得燃料利用率约束未能满足.文献[12]采用改进萤火虫算法优化分数阶比例积分微分(proportional integral differential,PID)参数,算法优化后,PID控制器的抗干扰能力增强,提高了SOFC的运行可靠性,但其同样无法实现多约束目标.文献[13]采用一种由鲁棒控制器和PID控制器组成的多回路控制器,这种方法能实现在燃料利用约束前提下的稳定输出电压,但增加了系统的复杂性.文献[14]提出一种新的智能比例积分自适应滑动模态控制器(intelligent proportional integral adaptive sliding mode control,IPI-ASMC),并设计抗饱和补偿器,以处理不确定性和执行器饱和问题,但抗饱和控制器的存在限制了系统的动态性能.文献[15-16]采用了一种多智能体的控制方式,实现了电压的精确跟踪,满足了燃料利用率要求,但其控制结构复杂,存在优化失败的风险. ...
Optimization of SOC fractional PID control parameters for solid oxide battery based on improved firefly algorithm
1
2021
... 文献[11]提出SOFC的神经网络模型,采用神经模糊控制方法实现输出电压的精确控制,但因其采用单通道控制策略,使得燃料利用率约束未能满足.文献[12]采用改进萤火虫算法优化分数阶比例积分微分(proportional integral differential,PID)参数,算法优化后,PID控制器的抗干扰能力增强,提高了SOFC的运行可靠性,但其同样无法实现多约束目标.文献[13]采用一种由鲁棒控制器和PID控制器组成的多回路控制器,这种方法能实现在燃料利用约束前提下的稳定输出电压,但增加了系统的复杂性.文献[14]提出一种新的智能比例积分自适应滑动模态控制器(intelligent proportional integral adaptive sliding mode control,IPI-ASMC),并设计抗饱和补偿器,以处理不确定性和执行器饱和问题,但抗饱和控制器的存在限制了系统的动态性能.文献[15-16]采用了一种多智能体的控制方式,实现了电压的精确跟踪,满足了燃料利用率要求,但其控制结构复杂,存在优化失败的风险. ...
Optimal robust control strategy of a solid oxide fuel cell system
1
2018
... 文献[11]提出SOFC的神经网络模型,采用神经模糊控制方法实现输出电压的精确控制,但因其采用单通道控制策略,使得燃料利用率约束未能满足.文献[12]采用改进萤火虫算法优化分数阶比例积分微分(proportional integral differential,PID)参数,算法优化后,PID控制器的抗干扰能力增强,提高了SOFC的运行可靠性,但其同样无法实现多约束目标.文献[13]采用一种由鲁棒控制器和PID控制器组成的多回路控制器,这种方法能实现在燃料利用约束前提下的稳定输出电压,但增加了系统的复杂性.文献[14]提出一种新的智能比例积分自适应滑动模态控制器(intelligent proportional integral adaptive sliding mode control,IPI-ASMC),并设计抗饱和补偿器,以处理不确定性和执行器饱和问题,但抗饱和控制器的存在限制了系统的动态性能.文献[15-16]采用了一种多智能体的控制方式,实现了电压的精确跟踪,满足了燃料利用率要求,但其控制结构复杂,存在优化失败的风险. ...
Voltage control of solid oxide fuel cell power plant based on intelligent proportional integral-adaptive sliding mode control with anti-windup compensator
1
2020
... 文献[11]提出SOFC的神经网络模型,采用神经模糊控制方法实现输出电压的精确控制,但因其采用单通道控制策略,使得燃料利用率约束未能满足.文献[12]采用改进萤火虫算法优化分数阶比例积分微分(proportional integral differential,PID)参数,算法优化后,PID控制器的抗干扰能力增强,提高了SOFC的运行可靠性,但其同样无法实现多约束目标.文献[13]采用一种由鲁棒控制器和PID控制器组成的多回路控制器,这种方法能实现在燃料利用约束前提下的稳定输出电压,但增加了系统的复杂性.文献[14]提出一种新的智能比例积分自适应滑动模态控制器(intelligent proportional integral adaptive sliding mode control,IPI-ASMC),并设计抗饱和补偿器,以处理不确定性和执行器饱和问题,但抗饱和控制器的存在限制了系统的动态性能.文献[15-16]采用了一种多智能体的控制方式,实现了电压的精确跟踪,满足了燃料利用率要求,但其控制结构复杂,存在优化失败的风险. ...
A data-driven output voltage control of solid oxide fuel cell using multi-agent deep reinforcement learning
1
2021
... 文献[11]提出SOFC的神经网络模型,采用神经模糊控制方法实现输出电压的精确控制,但因其采用单通道控制策略,使得燃料利用率约束未能满足.文献[12]采用改进萤火虫算法优化分数阶比例积分微分(proportional integral differential,PID)参数,算法优化后,PID控制器的抗干扰能力增强,提高了SOFC的运行可靠性,但其同样无法实现多约束目标.文献[13]采用一种由鲁棒控制器和PID控制器组成的多回路控制器,这种方法能实现在燃料利用约束前提下的稳定输出电压,但增加了系统的复杂性.文献[14]提出一种新的智能比例积分自适应滑动模态控制器(intelligent proportional integral adaptive sliding mode control,IPI-ASMC),并设计抗饱和补偿器,以处理不确定性和执行器饱和问题,但抗饱和控制器的存在限制了系统的动态性能.文献[15-16]采用了一种多智能体的控制方式,实现了电压的精确跟踪,满足了燃料利用率要求,但其控制结构复杂,存在优化失败的风险. ...
A novel data-driven controller for solid oxide fuel cell via deep reinforcement learning
1
2021
... 文献[11]提出SOFC的神经网络模型,采用神经模糊控制方法实现输出电压的精确控制,但因其采用单通道控制策略,使得燃料利用率约束未能满足.文献[12]采用改进萤火虫算法优化分数阶比例积分微分(proportional integral differential,PID)参数,算法优化后,PID控制器的抗干扰能力增强,提高了SOFC的运行可靠性,但其同样无法实现多约束目标.文献[13]采用一种由鲁棒控制器和PID控制器组成的多回路控制器,这种方法能实现在燃料利用约束前提下的稳定输出电压,但增加了系统的复杂性.文献[14]提出一种新的智能比例积分自适应滑动模态控制器(intelligent proportional integral adaptive sliding mode control,IPI-ASMC),并设计抗饱和补偿器,以处理不确定性和执行器饱和问题,但抗饱和控制器的存在限制了系统的动态性能.文献[15-16]采用了一种多智能体的控制方式,实现了电压的精确跟踪,满足了燃料利用率要求,但其控制结构复杂,存在优化失败的风险. ...








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}