0 引言
现如今能源日益紧张,随着电力需求的不断增长,以及人们环保意识的不断提高,超临界火电机组因具有能耗低、效率高及负荷适应性强等优点,被广泛应用于火力发电主力机组[1 -5 ] 。然而,超临界机组中的直流锅炉因缺少汽包而无法为受热面工质及能量平衡提供缓冲,同时,给水与燃料间的强耦合关系以及直流炉蓄热能力弱的特性,还会造成蒸汽温度控制时滞等问题。此外,煤质的品质与热值、超临界机组燃水比(firing rate to feed water ratio,FR/FW)系统的负荷波动等也是影响超临界机组燃水比系统控制的关键因素。因此,设计一个结构简单、易于实际应用的超临界机组燃水比控制系统具有极大的挑战性[6 -9 ] 。
目前,FR/FW控制方法主要有PID控制方法[10 ] 、模糊控制方法[11 ] 和自抗扰控制方法[12 ] 。文献[10 ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大。
为了解决当前主流控制方法存在的不足,本文将自耦PID(auto-coupling PID,ACPID)控制理论[16 -18 ] 应用于超临界机组FR/FW的控制中。将锅炉燃水比系统视为2个单变量回路系统:主汽压回路系统和中间点焓值回路系统。将回路之间的耦合视为总扰动,设计了自耦PI(auto-coupling PI,ACPI)控制器,并给出了相匹配的速度因子整定模型。本文不仅从理论上分析了ACPI控制方法的有效性,而且仿真实验也验证了所提控制方法在超临界机组FR/FW控制系统中的可行性。
1 超临界机组FR/FW控制系统
1.1 超临界机组FR/FW控制特性与模型
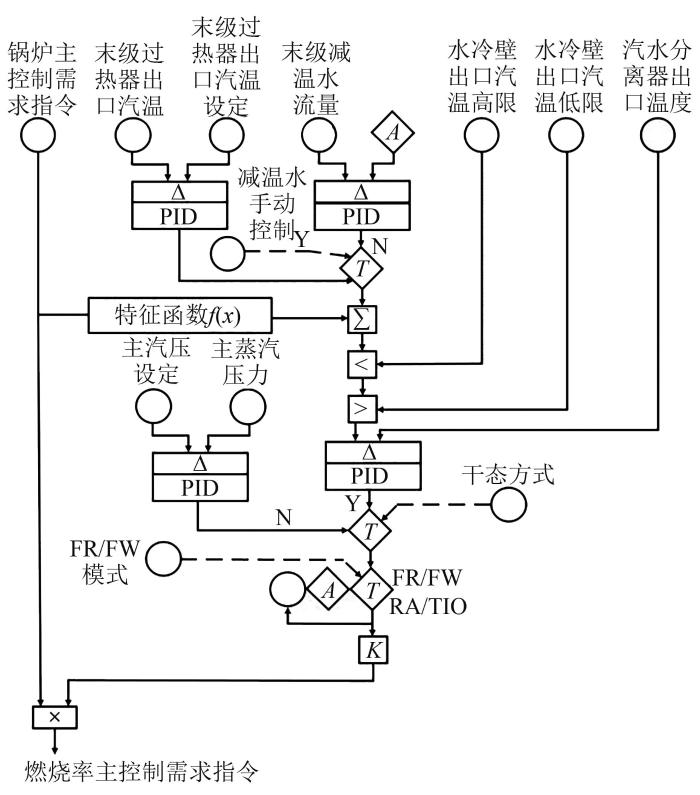
超临界机组是一个较为复杂的控制对象,随着负荷的变化,机组的动态特性也会随之变化[19 -21 ] 。给水量与燃料量的稳定控制是保证机组在不同工况下稳定运行的关键。图1 为某600 MW超临界机组在干态模式下的FR/FW控制系统。
图1
图1
FR/FW控制原理
A —设定值;T —温度;K —增益常数。
Fig. 1
FR/FW control principle
设计该FR/FW控制系统的目标为控制汽水分离器的出口蒸汽温度。具体步骤如下:根据锅炉的主控需求指令设定汽水分离器的出口温度,并将温度的测量值反馈给控制系统,通过PID主控制器进行运算得到FR/FW,然后基于此对燃烧率控制指令进行修正。该方案对汽水分离器的出口温度设置了上下限,有效地防止了因高温或低温对锅炉动态性能造成的损害。此外,将减温水流量及末级过热器蒸汽温度作为锅炉燃水比的前馈控制,当减温水流量或过热蒸汽温度发生变化时,FR/FW也会随之变化,这样FR/FW就可以通过快速修正燃烧率控制指令来调整燃料量。图1 中的FR/FW采用传统PID控制方法,但其解耦能力较差,在控制工况变动情形时尤为明显。超临界机组为典型的多变量控制系统,直流锅炉燃烧率-给水量、主蒸汽压力-中间点焓值之间均存在双向耦合关系[22 ] ,因此,可以建立如下被控对象模型[23 ] :
H ( s ) p ( s ) = G ( s ) B ( s ) W ( s ) = G 1 b ( s ) G 1 w ( s ) G 2 b ( s ) G 2 w ( s ) B ( s ) W ( s ) (1)
式中:H (s )为中间点焓值;p (s )为主蒸汽压力;B (s )为燃料量;W (s )为给水量; G s )为2× 2 传递函数矩阵;G 1 b ( s ) G 2 b ( s ) G 1 w ( s ) G 2 w ( s )
1)在100%典型工况下的超临界机组FR/FW模型[23 ] 如下:
G 1 b ( s ) = 0.053 s 2 + 0.758 3 s + 1.797 s 3 + 11 s 2 + 27.08 s + 0.092 9 G 1 w ( s ) = - 0.036 7 s 2 - 0.320 7 s - 1.014 s 3 + 11.14 s 2 + 27.56 s + 0.291 G 2 b ( s ) = 0.000 5 s 2 + 0.008 2 s + 0.052 6 s 3 + 11.14 s 2 + 27.56 s + 0.260 4 G 2 w ( s ) = 0.82 s + 0.058 11.14 s 2 + 27.56 s + 0.291 (2)
2)在70%典型工况下的超临界机组FR/FW模型如下:
G 1 b ( s ) = 0.011 s 2 + 0.203 1 s + 0.426 6 s 3 + 6.052 s 2 + 9.073 s + 0.033 1 G 1 w ( s ) = - 0.010 1 s 2 - 0.100 1 s - 0.200 2 s 3 + 6.003 s 2 + 8.962 s + 0.073 G 2 b ( s ) = 0.000 3 s 2 + 0.002 4 s + 0.007 4 s 3 + 6.001 s 2 + 8.929 s + 0.03 G 2 w ( s ) = 0.003 s + 0.028 s 2 + 0.144 1 s + 0.010 2 (3)
1.2 超临界机组FR/FW模型映射
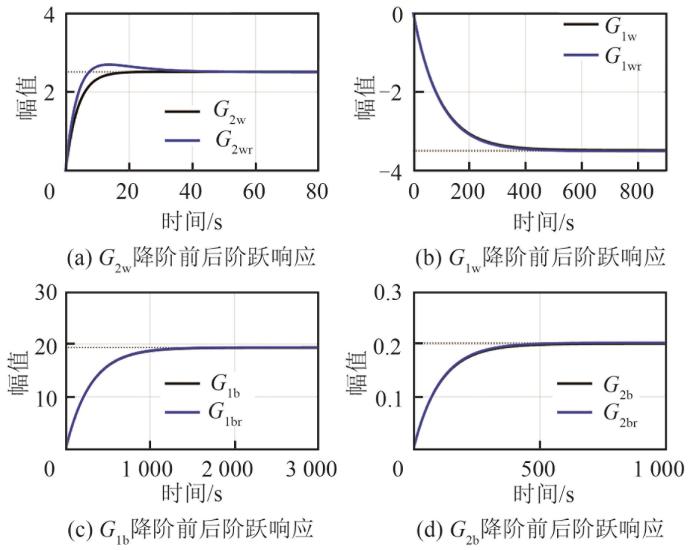
根据自动控制原理知识,所有高阶系统都可以表示为一阶和二阶系统的组合形式,高阶系统的单位阶跃响应是一阶(对应实根)和二阶(对应共轭复根)环节的组合,该组合系数(部分分式系数)与闭环零点、极点分布有关。当闭环极点负实部的绝对值越大,相应的模趋于0的速度越快,其影响也越小;组合系数越小,其影响也越小。因此,对于高阶系统而言,从理论上可以用一阶或二阶系统来近似表达。具体原理如下:若在所有闭环极点中,距离虚轴最近的某极点周围没有闭环零点,且其他闭环极点远离虚轴,则距离虚轴最近的闭环极点的时间常数较大,衰减较慢,在系统的时间响应过程中起主导作用,因此可称该极点为闭环主导极点,此时便可以用闭环主导极点所构成的子系统来等价表示为高阶系统。以高阶系统G 2 b ( s ) s 1 = - 0.009 s 2 = - 7.44 s 3 = - 3.69 z 1,2 = - 8.2 ± 6.16 i G 2 b ( s ) G 1 b ( s ) G 1 w ( s ) G 2 w ( s ) 2 、3 所示,其中G 2w 、G 1w 、G 1b 、G 2b 均为原系统阶跃响应,G 2wr 、G 1wr 、G 1br 、G 2br 均为降阶后的阶跃响应。
图2
图2
100%工况下降阶前后阶跃响应对比
Fig. 2
Comparison of step response before and after reduced-order under 100% working condition
图3
图3
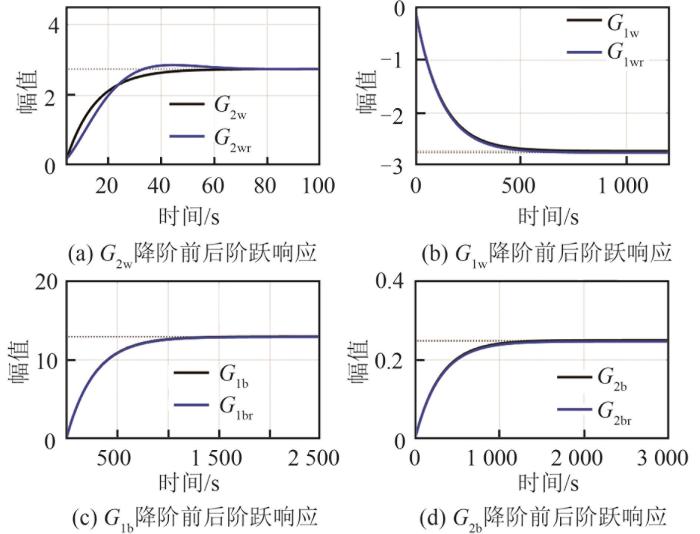
70%工况下降阶前后阶跃响应对比
Fig. 3
Comparison of step response before and after reduced-order under 70% working condition
从图2 、3 中可分别看出,不同工况下近似一阶系统与原高阶系统的阶跃响应几乎一致,说明了上述降阶方法的有效性。分别计算出不同工况下一阶系统各项系数,从而可以得到如下被控对象模型。
H ( s ) p ( s ) ≈ b 1 s + a 1 b 2 s + a 2 b 3 s + a 3 b 4 s + a 4 B ( s ) W ( s ) (4)
式中:a 1 、a 2 、a 3 、a 4 均为极点系数,其中a 1 = 0.003 435 a 2 = 0.010 6 a 3 = 0.009 485 a 4 = 0.261 3 b 1 、b 2 、b 3 、b 4 均为传递函数增益系数,其中b 1 = 0.066 25 b 2 = - 0.036 7 b 3 = 0.001 9 b 4 = 0.656
H ( s ) p ( s ) ≈ b 1 s + a 1 b 2 s + a 2 b 3 s + a 3 b 4 s + a 4 B ( s ) W ( s ) (5)
式中:a 1 = 0.003 65 a 2 = 0.008 19 a 3 = 0.003 367 a 4 = 3.159 b 1 = 0.047 3 b 2 = - 0.222 2 b 3 = 0.000 84 b 4 = 0.003
2 ACPI控制器设计
2.1 ACPI控制系统结构
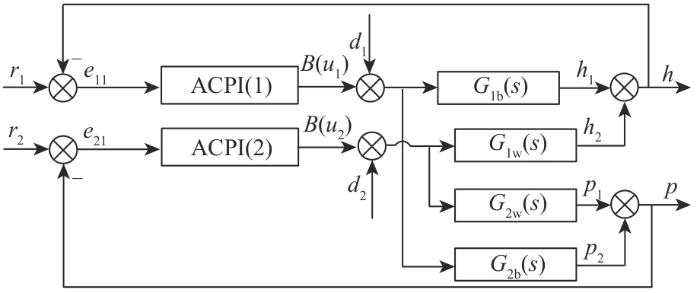
根据ACPID控制理论,分别设计中间点焓值环ACPI(1)控制器与主蒸汽压力环ACPI(2)控制器,得到本文的超临界机组FR/FW控制结构,如图4 所示。
图4
图4
超临界机组FR/FW控制结构
Fig. 4
FR/FW control structure of supercritical unit
2.2 中间点焓值环ACPI(1)控制器设计
由图4 可知,超临界FR/FW中间点焓值环ACPI(1)控制系统的跟踪误差e 11 为
e 11 = r 1 - h (6)
e 10 = ∫ 0 t e 11 d τ (7)
e ˙ 11 = r ˙ 1 - h ˙ = r ˙ 1 - [ - a 1 h 1 + b 1 ( u 1 + d 1 ) -
a 2 h 2 + b 2 ( u 2 + d 2 ) ] (8)
式中:r ˙ 1 h ˙ h 1 h 2 u 1 u 2 d 1 d 2
e ˙ 10 = e 11 e ˙ 11 = r ˙ 1 - h ˙ = w 1 - b 1 u 1 (9)
式中:e ˙ 10 w 1 为中间点焓值环ACPI(1)控制器的复合总扰动,w 1 = r ˙ 1 + a 1 h 1 - b 1 d 1 + a 2 h 2 - b 2 u 2 - b 2 d 2
根据ACPID控制理论思想[16 -17 ] ,定义的ACPI(1)比例控制力与积分控制力表达式如下:
u 1 p = 2 z c 1 e 11 / b 1 u 1 i = z c 1 2 e 10 / b 1 (10)
式中:u 1 p u 1 i z c 1 z c 1 > 0
根据式(10)即可得到中间点焓值环的ACPI(1)控制力为
u 1 = u 1 p + u 1 i (11)
2.3 主蒸汽压力环ACPI(2)控制器设计
由图4 可知,超临界FR/FW主蒸汽压力环ACPI(2)控制系统的跟踪误差e 21
e 21 = r 2 - p (12)
e 20 = ∫ 0 t e 21 d τ (13)
e ˙ 21 = r ˙ 2 - p ˙ = r ˙ 2 - [ - a 3 p 1 + b 3 ( u 1 + d 1 ) - a 4 p 2 + b 4 ( u 2 + d 2 ) ] (14)
式中:r ˙ 2 p ˙ p 1 p 2
e ˙ 20 = e 21 e ˙ 21 = r ˙ 2 - p ˙ = w 2 - b 4 u 2 (15)
式中:e ˙ 20 w 2 为主蒸汽压力环ACPI(2)控制器的复合总扰动,w 2 = r ˙ 2 + a 3 p 1 - b 3 u 1 - b 3 d 1 + a 4 p 2 - b 4 d 2
根据ACPID控制理论思想[16 -17 ] ,定义的ACPI(2)比例控制力与积分控制力表达式如下:
u 2 p = 2 z c 2 e 21 / b 4 u 2 i = z c 2 2 e 20 / b 4 (16)
式中:u 2 p u 2 i z c 2 z c 2 > 0
根据式(16)即可得到主蒸汽压力环的ACPI(2)控制力为
u 2 = u 2 p + u 2 i (17)
2.4 速度因子及过渡过程
ACPI控制系统的分析可参考文献[24 ]的定理1、2,可知,当z c 1 > 0 z c 2 > 0 z c 1 z c 2
z c 1 = 20 α 1 / t r 1 z c 2 = 20 α 2 / t r 2 (18)
式中:α 1 α 2 1 < α 1 ≤ 10 1 < α 2 ≤ 10 t r 1 t r 2
为了防止在控制启动初期因积分控制力过大而导致超调,需要分别为ACPI(1)与ACPI(2)加入过渡过程,使得期望指令r 1 r 2
G L P F 1 = 1 T r 1 s + 1 G L P F 2 = 1 T r 2 s + 1 (19)
式中:G L P F 1 G L P F 2 T r 1 T r 2 T r 1 = t r 1 / 5 T r 2 = t r 2 / 5
3 仿真实验分析
3.1 模型参数
为了验证本文控制方法的有效性,使用MATLAB/Simulink对ACPI控制方法、文献[23 ]中的自抗扰控制(active disturbance rejection control,ADRC)方法和传统PI控制方法建立模型并进行对比仿真实验研究。各控制器仿真模型参数如表1 所示。
3.2 定值阶跃响应仿真分析
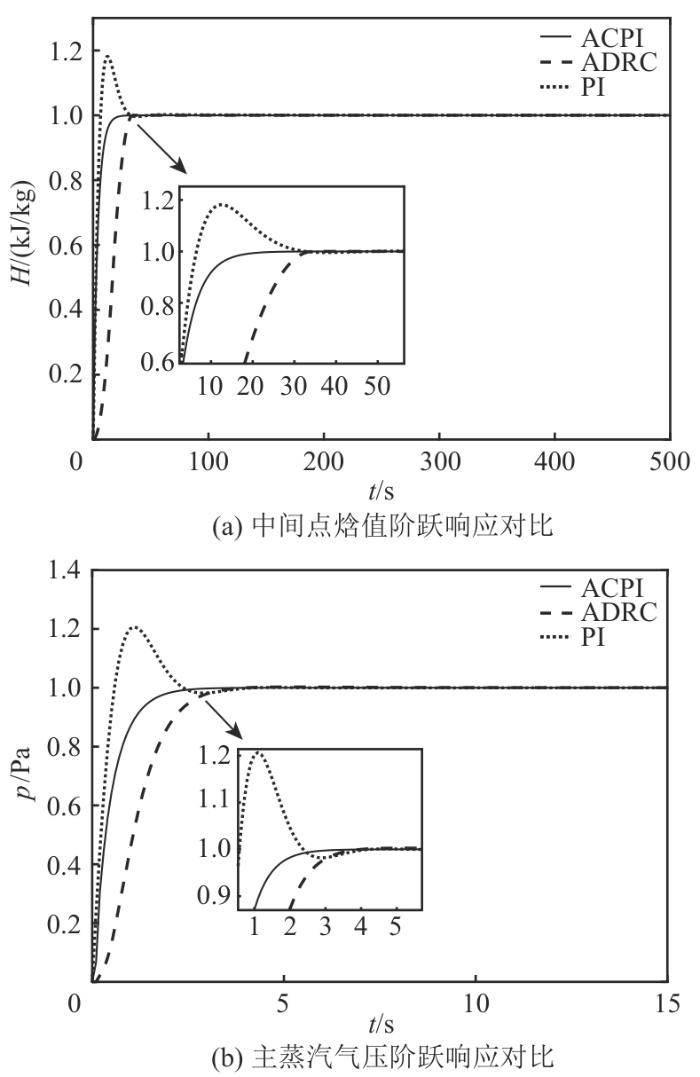
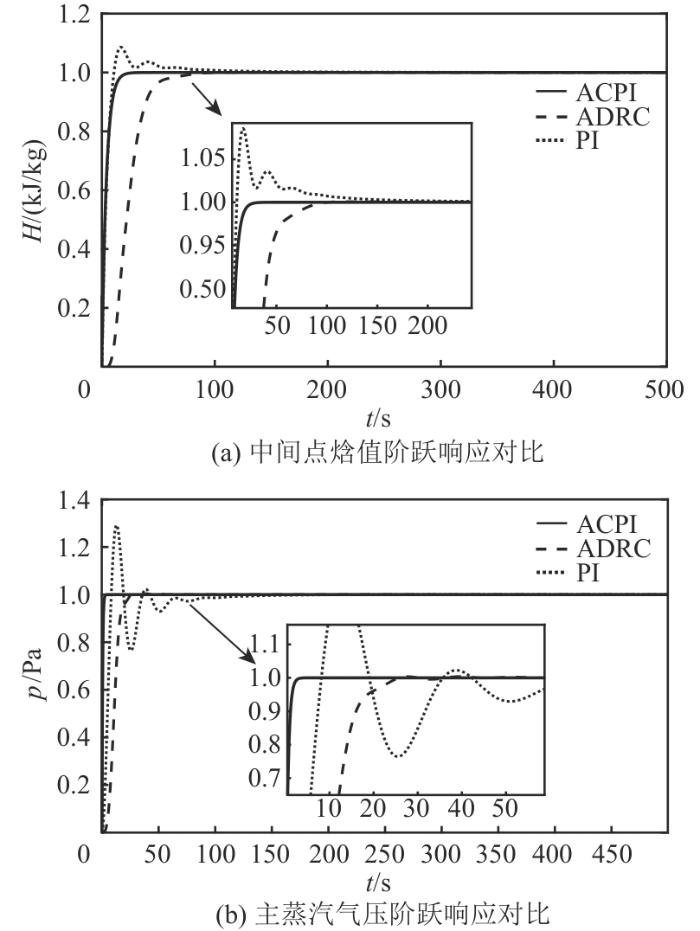
在不同工况模型下,分别进行中间点焓值、 主蒸汽压力单位阶跃定值仿真,其响应曲线分别如图5 、6 所示。
图5
图5
100%负荷单位阶跃响应仿真图
Fig. 5
Simulation diagram of 100% load unit step response
图6
图6
70%负荷单位阶跃响应仿真图
Fig. 6
Simulation diagram of 70% load unit step response
从图5 、6 可以看出,在不同工况下,相较于ADRC与PI控制方法,ACPI控制方法达到稳态的响应速度明显更快,且无超调,体现了ACPI控制策略下的超临界FR/FW系统具有较强的跟踪能力。具体响应速度性能指标如表2 所示。
3.3 系统抗干扰能力仿真分析
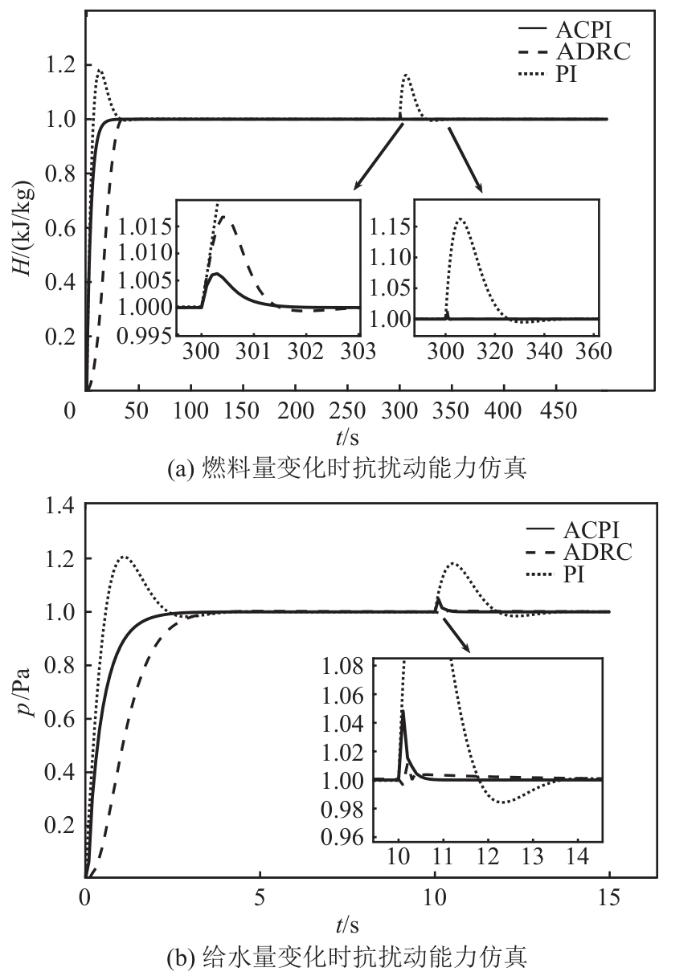
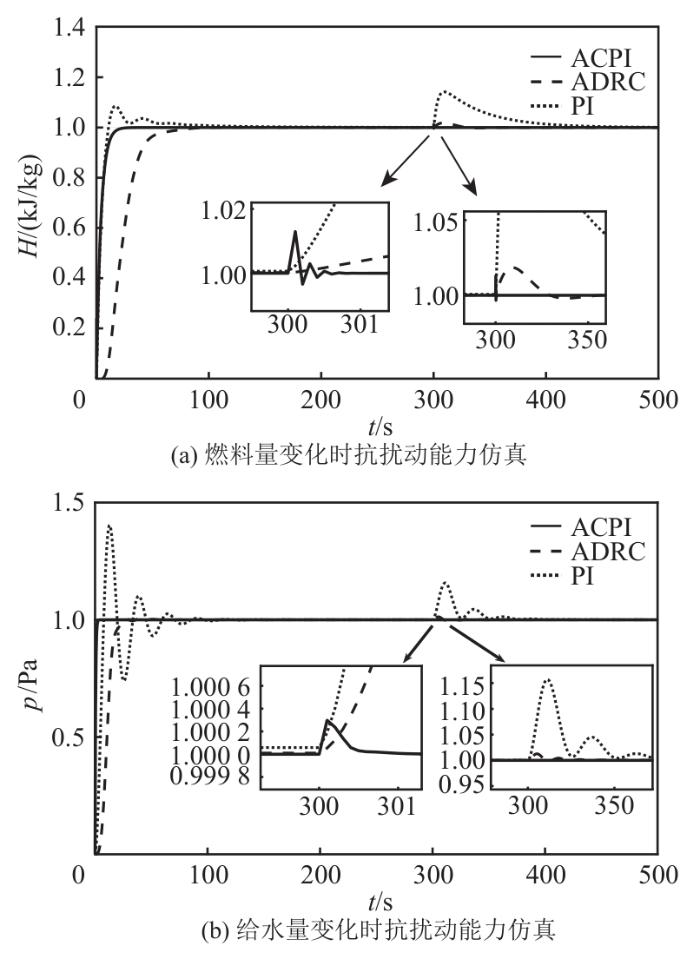
超临界FR/FW机组在实际运行过程中存在多种扰动,针对所设计的控制系统能否在产生扰动后快速恢复至稳态,对燃料量与给水量给予幅值为1的定值阶跃扰动,分别在300 s与10 s时加入扰动,观察其抗干扰能力。不同工况下抗扰动能力仿真结果分别如图7 、8 所示。
图7
图7
100%负荷抗扰动能力仿真图
Fig. 7
Simulation diagram of 100% load resistance to disturbance
图8
图8
70%负荷抗扰动能力仿真图
Fig. 8
Simulation diagram of 70% load resistance to disturbance
从图7 、8 中可以看出,在不同工况下,当燃料量与给水量发生变化时,相较于ADRC与PI控制方法,ACPI控制方法有着更强的抗扰动能力。具体的抗扰动能力性能指标如表3 所示。
4 结论
针对超临界FR/FW在不同工况下存在强耦合、抗扰动能力差等控制问题,设计了一种基于ACPID控制理论的简单、高效的控制方法。通过对该方法进行理论分析与仿真验证,可得出以下结论:
1)ACPI控制方法通过引入总扰动概念,淡化了线性系统与非线性复杂系统分类的概念,实现了对未知非线性系统的稳定控制。
2)ACPI控制方法不仅无需依赖受控对象的模型,还能使控制系统保持较强的鲁棒稳定性和抗扰动鲁棒性。此外,相较于PI控制方法与ADRC方法,ACPI方法展现出更快的响应速度与更强的抗扰动性能。
3)相较于ADRC与传统PI控制方法,所提控制方法具有控制系统结构简单的突出优势,每个控制器仅涉及2个参数的整定,因而计算量小,更便于实际应用。
参考文献
View Option
[2]
郭子岗 ,张海龙 ,梁舒婷 超临界CO2 锅炉研究综述
[J].电力科技与环保 ,2023 ,39 (6 ):490 -496 .
GUO Z G ZHANG H L LIANG S T Review of the studies on supercritical CO2 boilers
[J].Electric Power Technology and Environmental Protection ,2023 ,39 (6 ):490 -496 .
[3]
王学华 ,史鹏飞 ,林波 ,等 某1 050 MW超超临界燃煤机组深度调峰运行经济性与末级叶片安全性研究
[J].电力科技与环保 ,2023 ,39 (5 ):429 -435 .
WANG X H SHI P F LIN B et al Study on operating economy and safety of the final stage blade of a 1 050 MW ultra-supercritical coal-fired unit with deep peaking
[J].Electric Power Technology and Environmental Protection ,2023 ,39 (5 ):429 -435 .
[4]
杨正 ,孙亦鹏 ,温志强 ,等 深度调峰工况下超临界机组的干湿态转换策略研究
[J].发电技术 ,2024 ,45 (2 ):233 -239 .
YANG Z SUN Y P WEN Z Q et al Research on dry-wet conversion strategy of supercritical thermal power units under deep peaking condition
[J].Power Generation Technology ,2024 ,45 (2 ):233 -239 .
[5]
金宏伟 ,王策 ,张新胜 ,等 超超临界机组湿态给水控制策略的设计与应用
[J].浙江电力 ,2023 ,42 (10 ):107 -113 .
[本文引用: 1]
JIN H W WANG C ZHANG X S et al Design and application of the autonomous object oriented control strategies for wet water supply system of thermal power units
[J].Zhejiang Electric Power ,2023 ,42 (10 ):107 -113 .
[本文引用: 1]
[6]
葛举生 ,刘潇 ,王兆舜 ,等 660 MW超超临界机组协调控制系统优化
[J].发电设备 ,2022 ,36 (6 ):421 -426 .
[本文引用: 1]
GE J S LIU X WANG Z S et al Optimization of the coordinated control system in a 660 MW ultra supercritical unit
[J].Power Equipment ,2022 ,36 (6 ):421 -426 .
[本文引用: 1]
[7]
张潇 超超临界机组给水控制异常原因分析及处理
[J].电站系统工程 ,2022 ,38 (6 ):41 -43 .
ZHANG X Cause analysis and treatment of feed water control abnormality of ultra-supercritical unit
[J].Power System Engineering ,2022 ,38 (6 ):41 -43 .
[8]
钱海川 ,齐雪涛 1000 MW超超临界火电机组一次调频控制与应用
[J].上海节能 ,2022 (9 ):1221 -1225 .
QIAN H C QI X T Primary frequency regulation control and application of 1000 MW ultra supercritical thermal power unit
[J].Shanghai Energy Conservation ,2022 (9 ):1221 -1225 .
[9]
郑卫东 ,熊志成 ,陈金丹 ,等 超(超超)临界直流炉给水控制方案比较与分析
[J].电站系统工程 ,2021 ,37 (5 ):64 -67 .
[本文引用: 1]
ZHENG W D XIONG Z C CHEN J D et al Comparison and analysis of feedwater control schemes for (ultra) supercritical once-through boiler
[J].Power System Engineering ,2021 ,37 (5 ):64 -67 .
[本文引用: 1]
[13]
WANG C ZHAO Y LIU M et al Peak shaving operational optimization of supercritical coal-fired power plants by revising control strategy for water-fuel ratio
[J].Applied Energy ,2018 ,216 :212 -223 . doi:10.1016/j.apenergy.2018.02.039
[本文引用: 1]
[14]
LIU K WANG C WANG L et al Dynamic performance analysis and control strategy optimization for supercritical coal-fired boiler:a dynamic simulation
[J].Energy ,2023 ,282 :128712 . doi:10.1016/j.energy.2023.128712
[本文引用: 1]
[15]
HOU G HUANG T HUANG C Flexibility improvement of 1000 MW ultra-supercritical unit under full operating conditions by error-based ADRC and fast pigeon-inspired optimizer
[J].Energy ,2023 ,270 :126852 . doi:10.1016/j.energy.2023.126852
[本文引用: 1]
[18]
曾鹏 ,曾喆昭 ,熊屹林 七阶混沌振荡电力系统的自耦PD控制
[J].电力系统保护与控制 ,2023 ,51 (9 ):13 -20 .
[本文引用: 1]
ZENG P ZENG Z Z XIONG Y L Auto-coupling PD control of chaotic oscillation in a seven-dimensional power system
[J].Power System Protection and Control ,2023 ,51 (9 ):13 -20 .
[本文引用: 1]
[20]
张永 ,尹朝强 ,刘宇钢 ,等 风煤比对超超临界机组变负荷瞬态特性的影响
[J].中国电力 ,2024 ,57 (3 ):224 -232 .
ZHANG Y YIN C Q LIU Y G et al The influence of the air-coal ratio on transient characteristics of the ultrasupercritical power unit during the load cycling processes
[J].Electric Power ,2024 ,57 (3 ):224 -232 .
[21]
屠博 ,李德波 ,廖伟辉 ,等 超临界对冲燃烧锅炉低负荷运行及环保性能的模拟研究
[J].电力科技与环保 ,2024 ,40 (4 ):407 -415 .
[本文引用: 1]
TU B LI D B LIAO W H et al Simulation research on low load operation and environment performance of supercritical opposite combustion boiler
[J].Electric Power Technology and Environmental Protection ,2024 ,40 (4 ):407 -415 .
[本文引用: 1]
[22]
田亮 ,练海晴 ,刘鑫屏 ,等 直流锅炉蒸汽压力与中间点温度耦合特性分析
[J].中国电机工程学报 ,2017 ,37 (4 ):1142 -1150 .
[本文引用: 1]
TIAN L LIAN H Q LIU X P et al Coupling characteristics of steam pressure and intermediate point temperature for once-through boiler
[J].Proceedings of the CSEE ,2017 ,37 (4 ):1142 -1150 .
[本文引用: 1]
[23]
汪正海 ,黄冬松 ,毛晓飞 ,等 超临界机组燃水比耦合系统自抗扰控制
[J].控制工程 ,2020 ,27 (6 ):1076 -1080 .
[本文引用: 3]
WANG Z H HUANG D S MAO X F et al Active disturbance rejection control for firing rate to feed water ratio of supercritical unit coupled system
[J].Control Engineering of China ,2020 ,27 (6 ):1076 -1080 .
[本文引用: 3]
[24]
曾喆昭 论纠错无量纲比例增益的必要性及其改进策略
[J].控制工程 ,2022 ,29 (8 ):1387 -1394 .
[本文引用: 1]
ZENG Z Z Necessity of correcting dimensionless proportional gain and its improvement strategy
[J].Control Engineering of China ,2022 ,29 (8 ):1387 -1394 .
[本文引用: 1]
“十三五”燃煤发电设计技术发展方向分析
1
2018
... 现如今能源日益紧张,随着电力需求的不断增长,以及人们环保意识的不断提高,超临界火电机组因具有能耗低、效率高及负荷适应性强等优点,被广泛应用于火力发电主力机组[1 -5 ] .然而,超临界机组中的直流锅炉因缺少汽包而无法为受热面工质及能量平衡提供缓冲,同时,给水与燃料间的强耦合关系以及直流炉蓄热能力弱的特性,还会造成蒸汽温度控制时滞等问题.此外,煤质的品质与热值、超临界机组燃水比(firing rate to feed water ratio,FR/FW)系统的负荷波动等也是影响超临界机组燃水比系统控制的关键因素.因此,设计一个结构简单、易于实际应用的超临界机组燃水比控制系统具有极大的挑战性[6 -9 ] . ...
Development direction analysis of coal-fired power units’design technology during the 13th Five-Year Plan
1
2018
... 现如今能源日益紧张,随着电力需求的不断增长,以及人们环保意识的不断提高,超临界火电机组因具有能耗低、效率高及负荷适应性强等优点,被广泛应用于火力发电主力机组[1 -5 ] .然而,超临界机组中的直流锅炉因缺少汽包而无法为受热面工质及能量平衡提供缓冲,同时,给水与燃料间的强耦合关系以及直流炉蓄热能力弱的特性,还会造成蒸汽温度控制时滞等问题.此外,煤质的品质与热值、超临界机组燃水比(firing rate to feed water ratio,FR/FW)系统的负荷波动等也是影响超临界机组燃水比系统控制的关键因素.因此,设计一个结构简单、易于实际应用的超临界机组燃水比控制系统具有极大的挑战性[6 -9 ] . ...
Review of the studies on supercritical CO2 boilers
0
2023
某1 050 MW超超临界燃煤机组深度调峰运行经济性与末级叶片安全性研究
0
2023
Study on operating economy and safety of the final stage blade of a 1 050 MW ultra-supercritical coal-fired unit with deep peaking
0
2023
深度调峰工况下超临界机组的干湿态转换策略研究
0
2024
Research on dry-wet conversion strategy of supercritical thermal power units under deep peaking condition
0
2024
超超临界机组湿态给水控制策略的设计与应用
1
2023
... 现如今能源日益紧张,随着电力需求的不断增长,以及人们环保意识的不断提高,超临界火电机组因具有能耗低、效率高及负荷适应性强等优点,被广泛应用于火力发电主力机组[1 -5 ] .然而,超临界机组中的直流锅炉因缺少汽包而无法为受热面工质及能量平衡提供缓冲,同时,给水与燃料间的强耦合关系以及直流炉蓄热能力弱的特性,还会造成蒸汽温度控制时滞等问题.此外,煤质的品质与热值、超临界机组燃水比(firing rate to feed water ratio,FR/FW)系统的负荷波动等也是影响超临界机组燃水比系统控制的关键因素.因此,设计一个结构简单、易于实际应用的超临界机组燃水比控制系统具有极大的挑战性[6 -9 ] . ...
Design and application of the autonomous object oriented control strategies for wet water supply system of thermal power units
1
2023
... 现如今能源日益紧张,随着电力需求的不断增长,以及人们环保意识的不断提高,超临界火电机组因具有能耗低、效率高及负荷适应性强等优点,被广泛应用于火力发电主力机组[1 -5 ] .然而,超临界机组中的直流锅炉因缺少汽包而无法为受热面工质及能量平衡提供缓冲,同时,给水与燃料间的强耦合关系以及直流炉蓄热能力弱的特性,还会造成蒸汽温度控制时滞等问题.此外,煤质的品质与热值、超临界机组燃水比(firing rate to feed water ratio,FR/FW)系统的负荷波动等也是影响超临界机组燃水比系统控制的关键因素.因此,设计一个结构简单、易于实际应用的超临界机组燃水比控制系统具有极大的挑战性[6 -9 ] . ...
660 MW超超临界机组协调控制系统优化
1
2022
... 现如今能源日益紧张,随着电力需求的不断增长,以及人们环保意识的不断提高,超临界火电机组因具有能耗低、效率高及负荷适应性强等优点,被广泛应用于火力发电主力机组[1 -5 ] .然而,超临界机组中的直流锅炉因缺少汽包而无法为受热面工质及能量平衡提供缓冲,同时,给水与燃料间的强耦合关系以及直流炉蓄热能力弱的特性,还会造成蒸汽温度控制时滞等问题.此外,煤质的品质与热值、超临界机组燃水比(firing rate to feed water ratio,FR/FW)系统的负荷波动等也是影响超临界机组燃水比系统控制的关键因素.因此,设计一个结构简单、易于实际应用的超临界机组燃水比控制系统具有极大的挑战性[6 -9 ] . ...
Optimization of the coordinated control system in a 660 MW ultra supercritical unit
1
2022
... 现如今能源日益紧张,随着电力需求的不断增长,以及人们环保意识的不断提高,超临界火电机组因具有能耗低、效率高及负荷适应性强等优点,被广泛应用于火力发电主力机组[1 -5 ] .然而,超临界机组中的直流锅炉因缺少汽包而无法为受热面工质及能量平衡提供缓冲,同时,给水与燃料间的强耦合关系以及直流炉蓄热能力弱的特性,还会造成蒸汽温度控制时滞等问题.此外,煤质的品质与热值、超临界机组燃水比(firing rate to feed water ratio,FR/FW)系统的负荷波动等也是影响超临界机组燃水比系统控制的关键因素.因此,设计一个结构简单、易于实际应用的超临界机组燃水比控制系统具有极大的挑战性[6 -9 ] . ...
超超临界机组给水控制异常原因分析及处理
0
2022
Cause analysis and treatment of feed water control abnormality of ultra-supercritical unit
0
2022
1000 MW超超临界火电机组一次调频控制与应用
0
2022
Primary frequency regulation control and application of 1000 MW ultra supercritical thermal power unit
0
2022
超(超超)临界直流炉给水控制方案比较与分析
1
2021
... 现如今能源日益紧张,随着电力需求的不断增长,以及人们环保意识的不断提高,超临界火电机组因具有能耗低、效率高及负荷适应性强等优点,被广泛应用于火力发电主力机组[1 -5 ] .然而,超临界机组中的直流锅炉因缺少汽包而无法为受热面工质及能量平衡提供缓冲,同时,给水与燃料间的强耦合关系以及直流炉蓄热能力弱的特性,还会造成蒸汽温度控制时滞等问题.此外,煤质的品质与热值、超临界机组燃水比(firing rate to feed water ratio,FR/FW)系统的负荷波动等也是影响超临界机组燃水比系统控制的关键因素.因此,设计一个结构简单、易于实际应用的超临界机组燃水比控制系统具有极大的挑战性[6 -9 ] . ...
Comparison and analysis of feedwater control schemes for (ultra) supercritical once-through boiler
1
2021
... 现如今能源日益紧张,随着电力需求的不断增长,以及人们环保意识的不断提高,超临界火电机组因具有能耗低、效率高及负荷适应性强等优点,被广泛应用于火力发电主力机组[1 -5 ] .然而,超临界机组中的直流锅炉因缺少汽包而无法为受热面工质及能量平衡提供缓冲,同时,给水与燃料间的强耦合关系以及直流炉蓄热能力弱的特性,还会造成蒸汽温度控制时滞等问题.此外,煤质的品质与热值、超临界机组燃水比(firing rate to feed water ratio,FR/FW)系统的负荷波动等也是影响超临界机组燃水比系统控制的关键因素.因此,设计一个结构简单、易于实际应用的超临界机组燃水比控制系统具有极大的挑战性[6 -9 ] . ...
超临界机组汽温控制系统设计
2
2006
... 目前,FR/FW控制方法主要有PID控制方法[10 ] 、模糊控制方法[11 ] 和自抗扰控制方法[12 ] .文献[10 ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
... .文献[10 ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
The design of steam temperature control systems for supercritical generation units
2
2006
... 目前,FR/FW控制方法主要有PID控制方法[10 ] 、模糊控制方法[11 ] 和自抗扰控制方法[12 ] .文献[10 ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
... .文献[10 ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
基于给水温度前馈的中间点焓值模糊控制系统
2
2017
... 目前,FR/FW控制方法主要有PID控制方法[10 ] 、模糊控制方法[11 ] 和自抗扰控制方法[12 ] .文献[10 ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
... ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
Fuzzy control system for intermediate point enthalpy based on feedforward of feed-water temperature
2
2017
... 目前,FR/FW控制方法主要有PID控制方法[10 ] 、模糊控制方法[11 ] 和自抗扰控制方法[12 ] .文献[10 ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
... ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
超超临界机组协调控制系统线性自抗扰优化控制研究
2
2018
... 目前,FR/FW控制方法主要有PID控制方法[10 ] 、模糊控制方法[11 ] 和自抗扰控制方法[12 ] .文献[10 ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
... ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
Linear active disturbance rejection optimal control for ultra-supercritical unit coordination system
2
2018
... 目前,FR/FW控制方法主要有PID控制方法[10 ] 、模糊控制方法[11 ] 和自抗扰控制方法[12 ] .文献[10 ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
... ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
Peak shaving operational optimization of supercritical coal-fired power plants by revising control strategy for water-fuel ratio
1
2018
... 目前,FR/FW控制方法主要有PID控制方法[10 ] 、模糊控制方法[11 ] 和自抗扰控制方法[12 ] .文献[10 ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
Dynamic performance analysis and control strategy optimization for supercritical coal-fired boiler:a dynamic simulation
1
2023
... 目前,FR/FW控制方法主要有PID控制方法[10 ] 、模糊控制方法[11 ] 和自抗扰控制方法[12 ] .文献[10 ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
Flexibility improvement of 1000 MW ultra-supercritical unit under full operating conditions by error-based ADRC and fast pigeon-inspired optimizer
1
2023
... 目前,FR/FW控制方法主要有PID控制方法[10 ] 、模糊控制方法[11 ] 和自抗扰控制方法[12 ] .文献[10 ]通过动静态匹配、扰动补偿等方法有效提升了燃水比的调节精度和调节性能,但其鲁棒性差、自适应能力较弱;文献[11 ]提出了一种中间点焓值模糊控制方案,有效解决了中间点焓值响应速度与汽水分离器分离界面稳定性之间的矛盾,但其计算量较大,控制精度较低;文献[12 ]采用线性自抗扰控制方法进行类前馈解耦,该方法虽然提升了焓值和主蒸汽压力的抗扰动能力,但其控制器结构复杂;文献[13 ]提出了一种基于蓄热差的改进燃水比控制策略,有效减小了负载循环过程中负载率指令和实时负载率的累积偏差;文献[14 ]通过在给水量指令之前设计一阶惯性补偿单元,有效提高了水-燃料比控制的性能;文献[15 ]针对超临界机组在全工况下灵活运行能力欠佳的问题,设计了一种融合基于误差的自抗扰控制器和快速鸽子优化器的控制方法,有效提高了控制精度与抗干扰能力,但其计算量较大. ...
论PID与自耦PID控制理论方法
3
2020
... 为了解决当前主流控制方法存在的不足,本文将自耦PID(auto-coupling PID,ACPID)控制理论[16 -18 ] 应用于超临界机组FR/FW的控制中.将锅炉燃水比系统视为2个单变量回路系统:主汽压回路系统和中间点焓值回路系统.将回路之间的耦合视为总扰动,设计了自耦PI(auto-coupling PI,ACPI)控制器,并给出了相匹配的速度因子整定模型.本文不仅从理论上分析了ACPI控制方法的有效性,而且仿真实验也验证了所提控制方法在超临界机组FR/FW控制系统中的可行性. ...
... 根据ACPID控制理论思想[16 -17 ] ,定义的ACPI(1)比例控制力与积分控制力表达式如下: ...
... 根据ACPID控制理论思想[16 -17 ] ,定义的ACPI(2)比例控制力与积分控制力表达式如下: ...
On control theory of PID and auto-coupling PID
3
2020
... 为了解决当前主流控制方法存在的不足,本文将自耦PID(auto-coupling PID,ACPID)控制理论[16 -18 ] 应用于超临界机组FR/FW的控制中.将锅炉燃水比系统视为2个单变量回路系统:主汽压回路系统和中间点焓值回路系统.将回路之间的耦合视为总扰动,设计了自耦PI(auto-coupling PI,ACPI)控制器,并给出了相匹配的速度因子整定模型.本文不仅从理论上分析了ACPI控制方法的有效性,而且仿真实验也验证了所提控制方法在超临界机组FR/FW控制系统中的可行性. ...
... 根据ACPID控制理论思想[16 -17 ] ,定义的ACPI(1)比例控制力与积分控制力表达式如下: ...
... 根据ACPID控制理论思想[16 -17 ] ,定义的ACPI(2)比例控制力与积分控制力表达式如下: ...
自耦PID控制器
2
2021
... 根据ACPID控制理论思想[16 -17 ] ,定义的ACPI(1)比例控制力与积分控制力表达式如下: ...
... 根据ACPID控制理论思想[16 -17 ] ,定义的ACPI(2)比例控制力与积分控制力表达式如下: ...
Self-coupling PID controllers
2
2021
... 根据ACPID控制理论思想[16 -17 ] ,定义的ACPI(1)比例控制力与积分控制力表达式如下: ...
... 根据ACPID控制理论思想[16 -17 ] ,定义的ACPI(2)比例控制力与积分控制力表达式如下: ...
七阶混沌振荡电力系统的自耦PD控制
1
2023
... 为了解决当前主流控制方法存在的不足,本文将自耦PID(auto-coupling PID,ACPID)控制理论[16 -18 ] 应用于超临界机组FR/FW的控制中.将锅炉燃水比系统视为2个单变量回路系统:主汽压回路系统和中间点焓值回路系统.将回路之间的耦合视为总扰动,设计了自耦PI(auto-coupling PI,ACPI)控制器,并给出了相匹配的速度因子整定模型.本文不仅从理论上分析了ACPI控制方法的有效性,而且仿真实验也验证了所提控制方法在超临界机组FR/FW控制系统中的可行性. ...
Auto-coupling PD control of chaotic oscillation in a seven-dimensional power system
1
2023
... 为了解决当前主流控制方法存在的不足,本文将自耦PID(auto-coupling PID,ACPID)控制理论[16 -18 ] 应用于超临界机组FR/FW的控制中.将锅炉燃水比系统视为2个单变量回路系统:主汽压回路系统和中间点焓值回路系统.将回路之间的耦合视为总扰动,设计了自耦PI(auto-coupling PI,ACPI)控制器,并给出了相匹配的速度因子整定模型.本文不仅从理论上分析了ACPI控制方法的有效性,而且仿真实验也验证了所提控制方法在超临界机组FR/FW控制系统中的可行性. ...
超临界二氧化碳布雷顿循环控制策略研究综述
1
2023
... 超临界机组是一个较为复杂的控制对象,随着负荷的变化,机组的动态特性也会随之变化[19 -21 ] .给水量与燃料量的稳定控制是保证机组在不同工况下稳定运行的关键.图1 为某600 MW超临界机组在干态模式下的FR/FW控制系统. ...
A review of control strategies for supercritical carbon dioxide brayton cycle
1
2023
... 超临界机组是一个较为复杂的控制对象,随着负荷的变化,机组的动态特性也会随之变化[19 -21 ] .给水量与燃料量的稳定控制是保证机组在不同工况下稳定运行的关键.图1 为某600 MW超临界机组在干态模式下的FR/FW控制系统. ...
风煤比对超超临界机组变负荷瞬态特性的影响
0
2024
The influence of the air-coal ratio on transient characteristics of the ultrasupercritical power unit during the load cycling processes
0
2024
超临界对冲燃烧锅炉低负荷运行及环保性能的模拟研究
1
2024
... 超临界机组是一个较为复杂的控制对象,随着负荷的变化,机组的动态特性也会随之变化[19 -21 ] .给水量与燃料量的稳定控制是保证机组在不同工况下稳定运行的关键.图1 为某600 MW超临界机组在干态模式下的FR/FW控制系统. ...
Simulation research on low load operation and environment performance of supercritical opposite combustion boiler
1
2024
... 超临界机组是一个较为复杂的控制对象,随着负荷的变化,机组的动态特性也会随之变化[19 -21 ] .给水量与燃料量的稳定控制是保证机组在不同工况下稳定运行的关键.图1 为某600 MW超临界机组在干态模式下的FR/FW控制系统. ...
直流锅炉蒸汽压力与中间点温度耦合特性分析
1
2017
... 设计该FR/FW控制系统的目标为控制汽水分离器的出口蒸汽温度.具体步骤如下:根据锅炉的主控需求指令设定汽水分离器的出口温度,并将温度的测量值反馈给控制系统,通过PID主控制器进行运算得到FR/FW,然后基于此对燃烧率控制指令进行修正.该方案对汽水分离器的出口温度设置了上下限,有效地防止了因高温或低温对锅炉动态性能造成的损害.此外,将减温水流量及末级过热器蒸汽温度作为锅炉燃水比的前馈控制,当减温水流量或过热蒸汽温度发生变化时,FR/FW也会随之变化,这样FR/FW就可以通过快速修正燃烧率控制指令来调整燃料量.图1 中的FR/FW采用传统PID控制方法,但其解耦能力较差,在控制工况变动情形时尤为明显.超临界机组为典型的多变量控制系统,直流锅炉燃烧率-给水量、主蒸汽压力-中间点焓值之间均存在双向耦合关系[22 ] ,因此,可以建立如下被控对象模型[23 ] : ...
Coupling characteristics of steam pressure and intermediate point temperature for once-through boiler
1
2017
... 设计该FR/FW控制系统的目标为控制汽水分离器的出口蒸汽温度.具体步骤如下:根据锅炉的主控需求指令设定汽水分离器的出口温度,并将温度的测量值反馈给控制系统,通过PID主控制器进行运算得到FR/FW,然后基于此对燃烧率控制指令进行修正.该方案对汽水分离器的出口温度设置了上下限,有效地防止了因高温或低温对锅炉动态性能造成的损害.此外,将减温水流量及末级过热器蒸汽温度作为锅炉燃水比的前馈控制,当减温水流量或过热蒸汽温度发生变化时,FR/FW也会随之变化,这样FR/FW就可以通过快速修正燃烧率控制指令来调整燃料量.图1 中的FR/FW采用传统PID控制方法,但其解耦能力较差,在控制工况变动情形时尤为明显.超临界机组为典型的多变量控制系统,直流锅炉燃烧率-给水量、主蒸汽压力-中间点焓值之间均存在双向耦合关系[22 ] ,因此,可以建立如下被控对象模型[23 ] : ...
超临界机组燃水比耦合系统自抗扰控制
3
2020
... 设计该FR/FW控制系统的目标为控制汽水分离器的出口蒸汽温度.具体步骤如下:根据锅炉的主控需求指令设定汽水分离器的出口温度,并将温度的测量值反馈给控制系统,通过PID主控制器进行运算得到FR/FW,然后基于此对燃烧率控制指令进行修正.该方案对汽水分离器的出口温度设置了上下限,有效地防止了因高温或低温对锅炉动态性能造成的损害.此外,将减温水流量及末级过热器蒸汽温度作为锅炉燃水比的前馈控制,当减温水流量或过热蒸汽温度发生变化时,FR/FW也会随之变化,这样FR/FW就可以通过快速修正燃烧率控制指令来调整燃料量.图1 中的FR/FW采用传统PID控制方法,但其解耦能力较差,在控制工况变动情形时尤为明显.超临界机组为典型的多变量控制系统,直流锅炉燃烧率-给水量、主蒸汽压力-中间点焓值之间均存在双向耦合关系[22 ] ,因此,可以建立如下被控对象模型[23 ] : ...
... 1)在100%典型工况下的超临界机组FR/FW模型[23 ] 如下: ...
... 为了验证本文控制方法的有效性,使用MATLAB/Simulink对ACPI控制方法、文献[23 ]中的自抗扰控制(active disturbance rejection control,ADRC)方法和传统PI控制方法建立模型并进行对比仿真实验研究.各控制器仿真模型参数如表1 所示. ...
Active disturbance rejection control for firing rate to feed water ratio of supercritical unit coupled system
3
2020
... 设计该FR/FW控制系统的目标为控制汽水分离器的出口蒸汽温度.具体步骤如下:根据锅炉的主控需求指令设定汽水分离器的出口温度,并将温度的测量值反馈给控制系统,通过PID主控制器进行运算得到FR/FW,然后基于此对燃烧率控制指令进行修正.该方案对汽水分离器的出口温度设置了上下限,有效地防止了因高温或低温对锅炉动态性能造成的损害.此外,将减温水流量及末级过热器蒸汽温度作为锅炉燃水比的前馈控制,当减温水流量或过热蒸汽温度发生变化时,FR/FW也会随之变化,这样FR/FW就可以通过快速修正燃烧率控制指令来调整燃料量.图1 中的FR/FW采用传统PID控制方法,但其解耦能力较差,在控制工况变动情形时尤为明显.超临界机组为典型的多变量控制系统,直流锅炉燃烧率-给水量、主蒸汽压力-中间点焓值之间均存在双向耦合关系[22 ] ,因此,可以建立如下被控对象模型[23 ] : ...
... 1)在100%典型工况下的超临界机组FR/FW模型[23 ] 如下: ...
... 为了验证本文控制方法的有效性,使用MATLAB/Simulink对ACPI控制方法、文献[23 ]中的自抗扰控制(active disturbance rejection control,ADRC)方法和传统PI控制方法建立模型并进行对比仿真实验研究.各控制器仿真模型参数如表1 所示. ...
论纠错无量纲比例增益的必要性及其改进策略
1
2022
... ACPI控制系统的分析可参考文献[24 ]的定理1、2,可知,当z c 1 > 0 z c 2 > 0 z c 1 z c 2
Necessity of correcting dimensionless proportional gain and its improvement strategy
1
2022
... ACPI控制系统的分析可参考文献[24 ]的定理1、2,可知,当z c 1 > 0 z c 2 > 0 z c 1 z c 2







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}