




0 引言
核聚变反应堆是未来能源的关键解决方案之一,国际热核聚变实验堆(international thermonuclear experimental reactor,ITER)[1]旨在建造世界上最大的托卡马克,为未来实现商业化核聚变电站奠定科技基础。未来示范电站的中子辐照损伤预计高于ITER的辐照水平,将严重影响聚变材料性能[2]。国际聚变材料辐照装置(international fusion materials irradiation facility,IFMIF)[3]基于加速器实现在高通量中子辐照下的核聚变反应堆材料性能研究,然而接近真实环境的安全评估对于核聚变反应堆同样重要,聚变堆材料在受到聚变中子轰击的同时,还会承受热流和粒子流带来的协同效应,而这些是IFMIF无法体现的,且其高通量区域较小,仅有0.5 L,难以满足大型部件测试需求。中国科学院核能安全技术研究所与俄罗斯科学院布德科尔核物理研究所联合设计出基于气体动态阱的聚变中子源(gas-dynamic trap based fusion neutron source,GDT-FNS)[4],其能谱与聚变堆能谱一致,且高通量区域体积较大,满足部件级测试需求,但磁镜端部的开放磁力线使得其对聚变燃料的约束减弱,进而会间接影响中子产额。
对此,华中科技大学提出了基于场反位形级联磁压缩的氘氘聚变中子源新型方案[5]。相比于氘氚聚变反应,氘氘聚变虽然条件更苛刻,但原料丰富且成本低廉,同时可减少对氚增殖的依赖,具有技术前瞻性。在两级级联磁压缩模式下,首先通过快速的绝热磁压缩实现聚变反应率的大幅提升,紧接着通过慢磁压缩维持磁场位形,增加反应时长。场反位形为轴对称直线结构,具有较好的闭合性和接近于1的高比压,易于实现高压缩比的磁压缩,进而提升等离子体密度和中子通量密度,从而以较低成本实现具有较大高通量区域体积的聚变中子源。
该方案包含3个建设阶段。第一阶段,华中科技大学场反等离子体预研装置(Huazhong University of Science and Technology field-reversed configuration,HFRC)已完成建设并完成了场反等离子体形成阶段的关键技术预研[6]。第二阶段建设目标,磁约束氘氘聚变中子源预研装置(简称“预研装置”)聚焦于对等离子体的进一步研究,计划开展大压缩比级联磁压缩下场反等离子体的定标规律研究,目前正在详细设计阶段,预计建设期5年。最终将在第三阶段建设完成大体积高通量密度氘氘聚变中子源,预计具有大于25 L的高通量区域体积,为开展核聚变反应堆大部件材料性能研究提供设施基础。
作为第二阶段建设目标,该预研装置将基于HFRC研究成果进行设计与建设,优化并扩展了电源系统与主机系统,新增了中性束系统与多套诊断系统,使得整体系统结构更加复杂,放电流程的精度和复杂度均有所提升,对安全防控的要求也进一步提高。因此,预研装置控制系统设计方案有必要在HFRC控制系统[7]基础上进行重构升级。
控制、数据访问与通信(control, data access, and communication,CODAC)是ITER的中央控制系统[10],使用实验物理及工业控制系统框架(experimental physics and industrial control system,EPICS)[11]实现分布式控制。EPICS通道访问(EPICS channel access,CA)是EPICS的核心协议,用于客户端和输入输出控制器(input output controller,IOC)之间的数据通信。CODAC包含若干个IOC,上百个子系统在标准化开发后集成到系统中。CODAC具备高稳定性与扩展性,对聚变实验控制系统设计具有重要参考价值,但互操作性方面有待提升,且EPICS CA在与第三方服务集成时不具备通用性。CFET原生支持RESTful API,相比EPICS具备协议透明、易于集成以及互操作性等方面的优势。
本文针对磁约束氘氘聚变中子源预研装置的系统构成与实验过程,深入分析该装置控制需求,结合HFRC装置建设与运行经验,提出预研装置控制系统设计方案。预研装置控制系统沿用并优化CFET控制框架,保留灵活性优势,通过升级硬件设施、重构集成控制与拓展资源使用等多种措施,提升控制系统在安全、稳定与效率等方面的综合性能,并在部署运维中针对CFET特性践行DevOps方法论,增强分布式控制系统在大规模应用中的集中管理与迭代能力,稳定高效地为中子源预研装置建设与实验运行提供支撑。
1 控制需求分析
1.1 预研装置组成
预研装置采用轴对称的真空室,总长度约12 m,主要包含两侧的形成区、中部的对碰融合及压缩区和顶部的中性束注入口,如图1所示。
图1
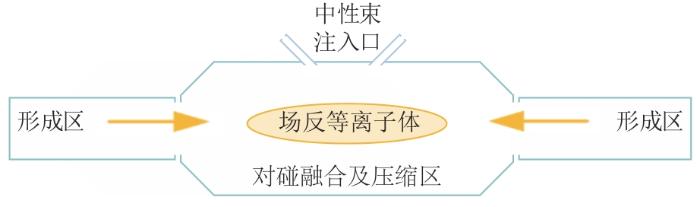
图1
磁约束氘氘聚变中子源预研装置真空室示意
Fig. 1
Diagram of preliminary research device of the vacuum chamber of magnetic confinement deuterium-deuterium fusion neutron source
场反等离子体在形成区经准稳态磁场的偏置、预电离磁场的电离,以及形成磁场中的反场与续流后,形成低参数场反等离子体。之后,依赖于形成区梯度磁场,场反等离子体相向喷射入对碰融合及压缩区,同时在中垂面附近注入中性束,提高其寿命,再经过快速上升的两级级联的快慢磁压缩,最终实现高通量聚变中子源。
为实现上述实验过程,预研装置划分为主机、中性束、诊断、电源与控制5个子系统,子系统内部根据功能、数量与分布再进一步划分。主机系统负责提供磁体以及高真空环境,并完成工作气体注入。中性束系统负责中性束的产生与注入。诊断系统负责测量等离子参数,以评估其性能和装置运行状态。电源系统负责按照设定时序向线圈快速供电,使磁体产生相应的磁场。控制系统包含子系统控制与中央控制,负责控制上述各系统,并将其集成到中央控制,协调完成放电流程。上述系统组成关系如图2所示。
图2
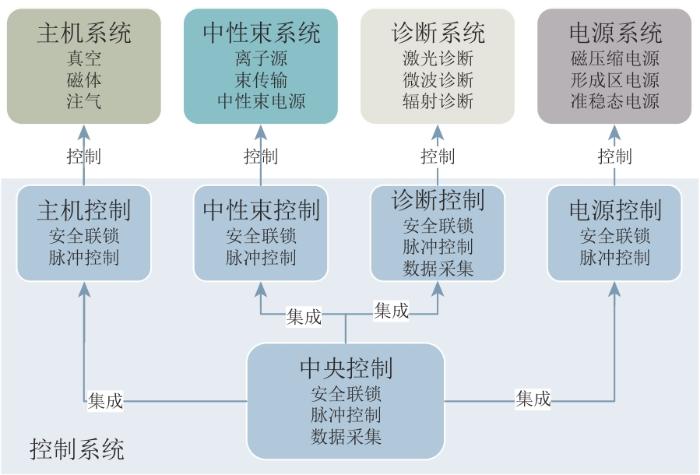
图2
磁约束氘氘聚变中子源预研装置系统组成
Fig. 2
System composition of preliminary research device of magnetic confinement deuterium-deuterium fusion neutron source
1.2 放电流程及对控制系统的功能需求
每炮放电实验中,操作员点击开始按钮后,预研装置开始自动执行稳态准备、脉冲触发、稳态复位和数据处理,再经过手动或自动化的总结与调整,该流程如图3所示。
图3
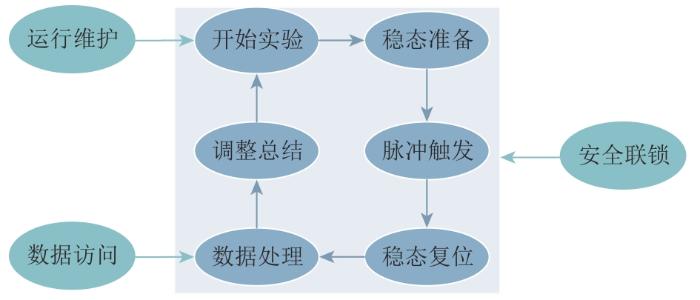
图3
磁约束氘氘聚变中子源预研装置放电流程
Fig. 3
Discharge flow of preliminary research device of magnetic confinement deuterium-deuterium fusion neutron source
在自动化放电流程中,稳态准备阶段将软件参数载入硬件配置,并启动加热、充电等准备工作。检测到稳态准备就绪后,按高精度时序触发主机注气、电源放电、中性束注入与诊断采集,完成脉冲放电。放电结束后完成稳态复位,通过闭合泄能回路完成磁能回收。在放电实验间隙,对采集到的诊断数据完成处理分析,总结记录该炮实验效果,根据诊断结果修改下一炮实验参数。
各阶段对控制系统有不同的功能需求:
1)在稳态准备与稳态复位阶段,需要通过集成控制对各个子系统进行协调,使装置整体按既定流程运行。
2)在脉冲触发阶段,需要由硬件提供时序精准可控的高速触发信号。
3)为实现诊断分析需求,需要提供从采集、处理、分析、存储到访问的全过程数据服务。
4)从开始实验到稳态复位阶段,实验大厅处于高危状态,需要提供人员安全联锁保障,且在实验全程中需要提供环境与设备的安全联锁保障。
5)在调整阶段需要支持大批量参数修改,在总结阶段需要提供自动化日志工具。
6)装置在停运期间会对装置升级维护,需要对此提供支持敏捷开发的自动化运维工具。
脉冲触发阶段需要对各系统设备提供硬件触发,其中电源系统的精度要求最高。电源系统为了实现精准控制的磁场位形,采用基于脉冲电容器的高精度高压脉冲电源,其技术要点之一是提供高精度触发。脉冲电源自身的时序需求预计为200 ns,外部触发造成的抖动需要控制在5%以内,因此触发精度预计需要在10 ns以内。
预研装置存在多处高危环节,包括以下情况:为形成高磁通压缩磁场,拟采用60 kV高压电源对电路充电,异常使用时将存在电击、电弧等危险;CO2干涉仪用于测量电子弦积分密度,该激光属于远红外线,使用不当会造成皮肤灼伤或引起火灾;装置建成后预计产生高通量中子,其辐照易对真空壁的第一壁材料造成损伤,可通过氦质谱检漏仪设备检测其完整性。为保障实验安全,控制系统需要基于硬件提供时延低于10 ms的安全联锁保护。
1.3 HFRC控制需求对比
与HFRC相比,预研装置的系统组成与放电流程更复杂,电源规模更庞大,对磁场位形控制精度以及安全风险防控的要求更高,关键控制需求对比如表1所示。
表1 预研装置与HFRC控制需求对比
Tab. 1
| 控制需求 | 预研装置 | HFRC |
|---|---|---|
| 系统组成 | 新增中性束 | 主机、电源、诊断 |
| 电源规模 | 形成区48套、电离32套、准稳态10套、磁压缩112套 | 形成区32套 |
| 高压风险 | 60 kV | 20 kV |
| 安全防控 | 硬件实现 | 软件实现 |
| 集成时延 | 100 ms | 2 s |
| 时序需求 | 200 ns(5%抖动) | 1 μs(10%抖动) |
| 数据服务 | 新增分析处理 | 采集、存储、访问 |
| 调整总结 | 可自动化 | 人为操作 |
2 控制系统整体设计
2.1 软件组成
为满足预研装置控制需求,控制系统包含集成控制、核心服务、资源应用以及DevOps工具,如图4所示。
图4
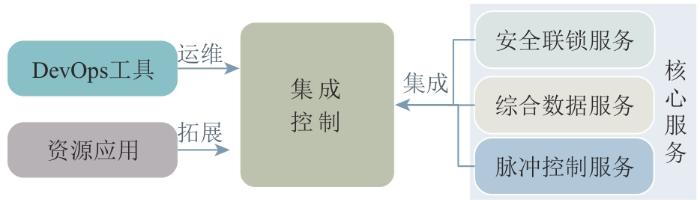
图4
预研装置控制系统组成
Fig. 4
Composition of control system for preliminary research device
核心服务基于硬件设备搭建,提供安全联锁等服务。集成控制负责集成并协调3项核心服务,完成实验流程。资源应用是对集成控制资源的拓展应用,提升实验与科研效率。DevOps工具负责提供一体化运维管理。
2.2 硬件架构
控制系统通过光纤传输将实验大厅、机房与控制大厅的设备互联,构成4类硬件网络,包括集成控制网、数据传输网、安全联锁网与脉冲时序网,且后3类网络下的可通信设备会同时接入集成网络。实验大厅的分布式设备通过单元控制柜接入硬件网络。为增强通信稳定性,单元控制柜封闭且单点接地,内部使用抗电磁干扰设备,外部使用光纤抗干扰传输。硬件架构如图5所示,蓝色框图表示单元控制柜。
图5
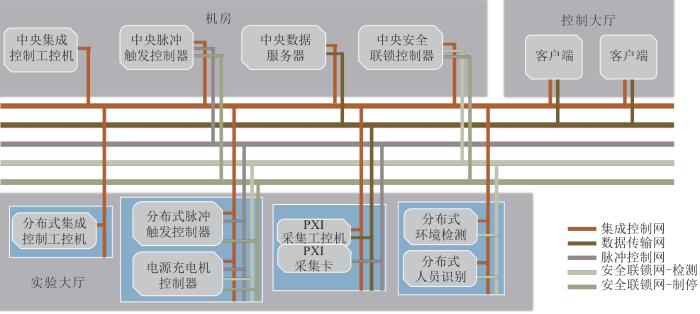
图5
预研装置控制系统硬件架构
Fig. 5
The hardware architecture of control system for preliminary research device
集成控制网通过以太网控制接入设备,包含控制大厅客户端、机房集控服务器、实验大厅工控机,以及其他可通信设备,包括可编程逻辑控制器(programmable logic controller,PLC)与现场可编程门阵列。单元控制柜内的串口设备通过注册插孔45(registered jack 45,RJ45)、DB9等硬件接口接入,经串口服务器转为以太网通信。以太网设备直接通过柜体内交换机相连,并通过光模块转换为光纤以太网在柜体外传输,接入柜体外的工控机。
数据传输网通过高速以太网传输采集数据,包含机房数据服务器与实验大厅采集设备。外围组件互联/快速通道(peripheral component interconnect/express,PCI/PCIe)以及PCI扩展仪器/快速通道(PCI extensions for instrumentation/express,PXI/PXIe)采集设备通常需要与控制器嵌入式耦合,故接入时需要在单元控制柜内部署采集工控机。
安全联锁网包含中央安全联锁控制器、分布式检测设备以及高危受控设备,可对其进行检测或制停。分布式检测状态与实验当前状态以数字信号形式输入中央安全联锁控制器,联锁制停处理同样以数字信号形式从中央安全联锁控制器输出到高危受控设备。
脉冲时序网内,中央脉冲控制器位于机房,为分布式脉冲控制器提供时序触发信号;分布式脉冲控制器位于实验大厅的若干单元控制柜,接收中央脉冲控制器的触发信号,在本地快速处理后将其传达至待触发仪器。
3 控制集成
3.1 控制集成结构
预研装置的系统数量众多,且系统内部的设备仪器与运行逻辑迥异,因此需要使用模块化的控制单元为单个设备、设备组或子系统提供可灵活定制的控制服务。控制单元即一套可独立运行内部逻辑的CFET模块,例如单个高速采集卡控制单元负责该张采集卡从参数配置、采集准备到上传数据的内部运行逻辑。
控制集成是将多个控制单元的运行逻辑封装的过程,通过一个上层控制单元将其协调统一为一套运行逻辑,从而实现简单透明的自顶向下控制。通过逐层的控制集成,最终顶层的控制单元即中央控制单元。实验时,操作员仅需要专注于对中央控制单元的简单操作与状态观察,即可完成自动化放电流程。如图6所示,控制系统整体根据装置子系统的结构、功能与分布,划分形成树状集成结构。
图6
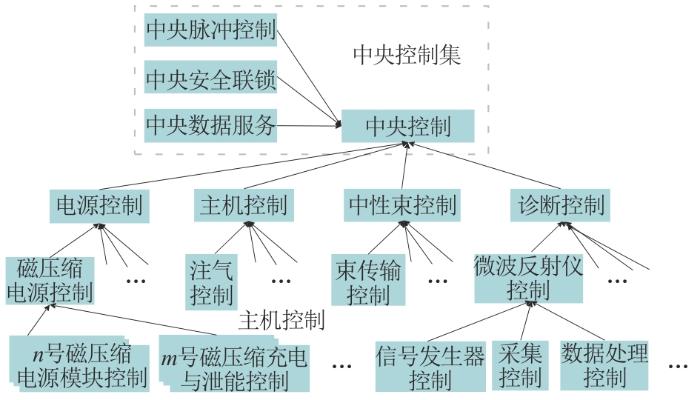
中央控制单元与3项核心服务的中央节点共同构成中央控制系统,这是能够完整提供基本服务的最小集合。在子系统测试研究阶段,中央控制系统的简化版副本与该子系统的控制单元一同构成测试控制系统,辅助子系统在接入预研装置前完成充分的独立测试。
3.2 集成松耦合
控制单元的逻辑运行依靠可灵活定制的有限状态机来实现,状态机任意时刻所处的状态是唯一确定的。状态机通过依次计算判断在当前状态下是否有满足的跳转条件,若有,则执行相应任务并跳转到相应状态;若无,则停留在原状态。
虽然状态机具有直接执行任务的能力,但是若通过上层对下层的直接命令实现集成,将导致层级间耦合紧密,难以灵活调整集成结构。控制集成采用观察者模式与中继资源达成松耦合结构。在观察者模式中,上下层控制单元通过对彼此的状态观察实现自身内部逻辑的运行。下层单元通过观察上层单元的状态,明确内部逻辑的运行时机;上层单元将下层单元视作内部结构,通过检查多个下层单元状态是否全部达到预期,协调同步内部逻辑的运行阶段。
图7为磁压缩电源控制与磁压缩电源模块控制之间的部分耦合关系。
图7
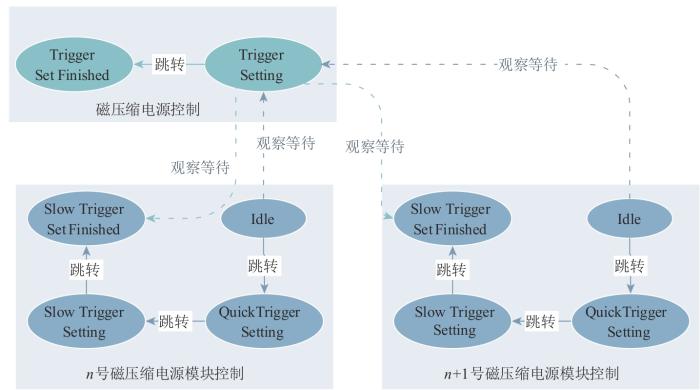
图7
磁压缩电源控制与模块控制耦合关系
Fig. 7
Coupling between magnetic compression power control and module control
模块控制观察到磁压缩控制进入Trigger Setting状态后,依次跳转到Quick Trigger Setting和Slow Trigger Setting,执行两级级联磁压缩触发时序的硬件设定,执行完毕后再跳转到Slow Trigger Set Finished。磁压缩控制在确认所有模块控制已处于状态Slow Trigger Set Finished后,跳转到Trigger Set Finished。
控制单元对彼此的状态观察基于中继资源实现,便于结构解耦与运行模式切换。在正常运行模式下,中继资源是实际状态值的实时反映;切换为调试模式时,中继资源是可以手动修改的虚拟值,使得上层能够忽略部分下层完成调试,或者下层能够脱离上层单独调试。
3.3 集成运行效率
集成运行效率取决于状态机能否即时完成状态观察与条件判断。HFRC控制系统采用的观察方式是轮询,即周期性读取与判断条件相关的资源值。由于分布式控制系统在集成控制网络内存在大量需要查询的资源,为避免过于频繁的轮询导致网络拥塞,状态机轮询周期不宜低于1 s。由于系统结构复杂,假定系统整体的集成层次有5层,则一次自底向上的状态观察总时延约4 s。为使延迟不可察觉,需要将总时延优化至100 ms以内,该方式无法满足。
本方案将观察方式升级为更高效的更新订阅。所有资源支持自动发布变更事件通知,状态机订阅相关资源的变更通知,并在收到该通知后获取资源值完成条件判断。订阅机制的网络带宽开销低,且运行时延约为20 ms,使得系统整体运行延迟约为80 ms,从而满足效率需求。
3.4 异常收集处理
状态机的跳转条件不仅用于判断正常运行逻辑,也负责检测异常,包括状态异常和超时异常。在检测到异常后,其相关信息会被传送到统一的异常消息队列,由中央控制单元直接接收与记录,并结合警报通知操作员当前实验异常,需要人为检查与处理。通过人为或自动处理,中央控制单元发布制停重置事件,该事件由所有控制单元统一订阅,从而实现系统整体的快速制停重置。
重置后,操作员可通过中央控制单元记录的异常日志定位故障,再根据故障所在服务的本地日志进一步分析与处理。
不同于普通状态的逐级传递,异常收集处理类似于硬件安全联锁的两级分布,是每个控制单元与中央控制单元之间的直接交互,从而加快异常响应速度。
3.5 集成运行流程
上述集成机制使得各子系统控制跟随中央控制的状态变化,协同完成实验流程运行。
中控初始状态为Idle,表示待机。在实验开始后的稳态准备阶段,中控首先进入Self Check状态,使得各子控完成初步自检。在确保各项设备或服务正常在线后,中控依次进入Pre Set、Pre Heat和Pre Charge等状态,使得各子控完成参数载入、元件加热和电源充电等操作。
确保准备完毕后,中控进入Fire状态,由脉冲控制服务提供快速精确的时序控制,完成工作气体注入、电源放电、中性束注入与数据快速采集等工作。
脉冲触发结束后的稳态复位阶段,中控依次进入Recover、Upload和Self Check等状态,使得各子控完成能量回收、数据上传与状态自检等操作。之后再自动化完成数据处理和调整总结,该自动化过程可暂停用于完成手动操作。最终中控回到Idle,等待下一轮开始。
4 核心服务
4.1 安全联锁服务
安全联锁服务负责在实验期间保障人员、环境与设备安全。中央安全联锁控制基于可编程逻辑控制器(programmable logic controller,PLC)对数字量输入输出(input output,I/O)的高速处理实现,包含硬件检测、硬件制停与软件通知等阶段。
检测阶段,接收来自检测设备的数字信号,最高检测频率可达100 Hz,同时接收来自中央控制的当前实验状态,对各输入进行逻辑运算,可识别到非法闯入、放射性泄漏与高危设备故障等异常。识别到异常后迅速进入硬件制停阶段,中央安全联锁控制向高压电源、脉冲触发控制器、继电器等设备发送时延低于10 ms的紧急制停信号,确保装置快速复位。通知阶段,中央安全联锁控制通过开源统一架构通信协议(open platform communications unified architecture,OPCUA)[20]与集成控制通信,通知实验流程进行异常处理。
安全联锁服务至关重要,它大大减少了人员和设备受到潜在危险的风险,确保了实验可行性。
4.2 脉冲控制服务
由于实验对触发的高精度要求在于相对时间,而非绝对时间,因此不采用外部参考时钟,而是采用分布式基准时钟,通过中央、分布式2级触发设计结构实现高精度脉冲控制。中央触发系统主要用于实现最高级别、大范围的触发分发,通道数量不低于100个。分布式触发系统则部署在各个需要触发的子系统内部,能够实现更细致、局部的触发控制,通道数量不低于10个。触发信号通过光纤传输,实现长距离无损传输,并通过传输延时补偿功能,确保光纤长度的变化不会影响触发信号的精度。在软件参数设置阶段,通过集成控制与控制器通信,为各通道设定精度10 ns、支持范围10 s的延时参数,并在稳态准备阶段将参数设定入控制器中。
通过2级结构触发设计,脉冲控制服务能够实现上千个模块的高精度同步控制,确保各设备在脉冲阶段按时序依次触发。
4.3 综合数据服务
数据服务涵盖数据的采集、处理、分析与访问等环节,执行过程如图8所示。
图8
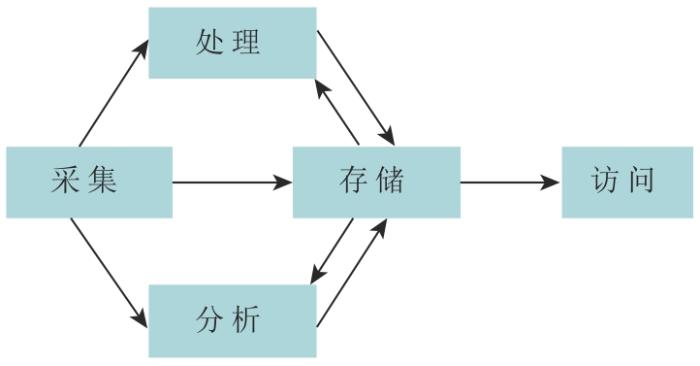
采集阶段,根据诊断任务不同,需要提供高速采集卡、红外相机或示波器等不同类型采集仪器的设备驱动。模拟信号经采集设备捕获并转换为数字信号,传输至采集工控机后转换为层次数据格式第五版(hierarchical data format version 5,HDF5)[21]格式文件暂存,完成采集。
数据处理阶段根据任务配置对数据进行清洗、转换,结果以HDF5格式另存;数据分析阶段根据任务配置对数据进行建模解释,用于支持实验决策,结果可写入CFET资源或JavaScript对象表示法(JavaScript object notation,JSON)格式文件中。
采集工控机作为数据传输网中的边缘设备,需要将本地数据文件通过高速以太网传输给中央数据服务器,基于MDSplus[22]数据库完成持久化存储。处理与分析的计算任务可在本地执行边缘计算,从而充分利用计算资源;或者在存储完毕后由服务器执行集中计算,从而涵盖更多的源数据进行处理分析。
访问阶段,服务提供编程接口与图形用户界面(graphical user interface,GUI),使得实验人员能够快速访问到上一炮脉冲实验数据与分析结果。
综合数据服务确保了实验数据的高效利用和科研价值的最大化。
5 资源应用
5.1 统一访问形式
CFET遵循Web协议,采用统一资源标识符(uniform resource identifier,URI),例如通过“
如表2所示,CFET资源类型包括Status、Config、Method和Event四种。
表2 CFET资源类型
Tab.2
| 类别 | 操作 | 用法 |
|---|---|---|
| Status | 只读 | 反映软硬件服务的实时状态 |
| Config | 可读可写 | 软件层面参数设定,与硬件实际值无关 |
| Method | 调用执行 | 通过返回值反馈是否执行成功 |
| Event | 可订阅 | 主要用于Status/Config资源变化自动通知 |
对于资源使用者而言,URI资源访问形式可以忽略资源具体所在的模块、服务与设施,基于URI实现对资源的透明访问,该透明简化过程如图9所示。
图9
5.2 资源综合应用
基于URI统一访问形式,资源能够与支持RESTful API的第三方应用快速兼容,通过扩展软件生态系统提供丰富的资源综合应用服务。
5.2.1 GUI交互
WidgetUI是CFET原生支持的GUI交互定制工具,该工具提供多种交互框图。框图通过URI配置,实现与CFET资源的绑定,从而可对资源进行可视化操作。WidgetUI提供用于读、写与调用类通用框图的同时,针对CFET特殊资源类型提供特殊框图,例如针对状态机提供可动态显示状态跳转的框图,便于观察实验运行状态与趋势。
5.2.2 状态回溯分析
各实验状态值在稳态阶段以秒级变化,通过对Status的时序性记录,能够实现对实验运行状况的回溯分析。Status通过插件式数据代理工具Telegraf,形成从资源收集、字段处理数据到写入时序数据库InfluxDB[23]的数据链,再通过InfluxDB提供的GUI界面或查询接口实现对状态值的回溯分析。
5.2.3 参数批量重载
放电实验间隙,实验人员需要通过修改大量Config参数调整放电策略,该修改过程涉及对过往参数的重载。为实现参数重载,每一炮的Config值会通过代理工具Telegraf自动存入可扩展、可快速读写的MongoDB[24]数据库。为实现批量化配置,CFET提供可定制的参数管理模块,该模块通过URI指定Config集合,既能够基于MongoDB查询功能实现对集合内所有Config的按炮号参数重载,也能够通过表格形式完成对参数的批量化手动修改。
5.2.4 总结日志定制
每一炮放电实验结束后,实验人员需要根据该炮的实验意图、运行状况以及诊断数据完成总结日志的记录。CFET提供可定制的资源转换模块,能够自定义资源之间的转换逻辑,将参数配置状况、实验运行状况与诊断数据分析处理结果映射为简单明了的定制资源值,并基于MongoDB实现定制资源的自动记录,从而大幅减少人为操作,显著降低实验总结的错误频率。
6 DevOps实践
6.1 CFET运行模型
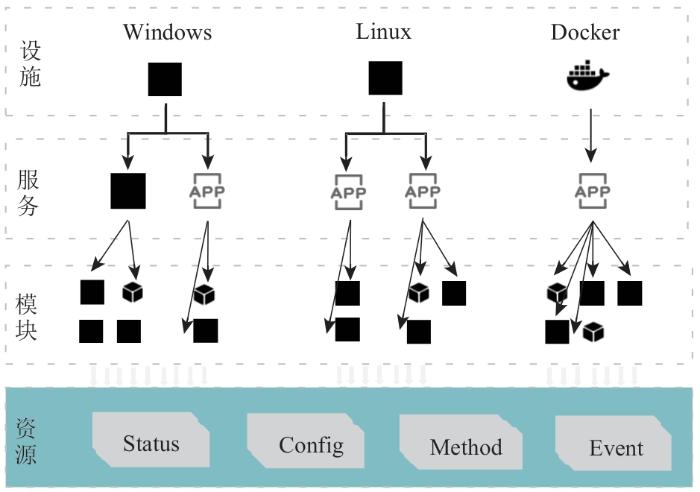
为实现敏捷开发,CFET采用微服务架构和模块化设计,服务和模块的具体运行形式分别是可执行程序APP和可动态挂载Thing,一个APP可动态挂载多个Thing。
ThingDll存放所有相关动态链接库(dynamic link library,DLL),包括Thing自身以及依赖库的DLL;Thing Config存放相关文本配置,包含Thing的类名与初始化配置,并且内部文件夹结构对应Thing的挂载结构;Global Config存放APP的相关信息。CFET服务运行模型如图10所示。
图10
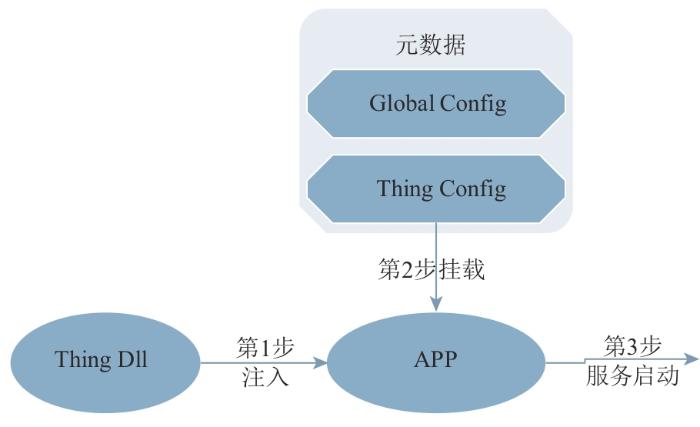
其中,启动时,APP首先依据Thing Dll完成DLL的动态注入,再依据Thing Config完成所有Thing的动态挂载,最后依据Global Config完成Web服务整体的初始化,即可开始运行服务与响应请求。Global Config和Thing Config包含APP的所有文本配置,共同构成APP的元数据。
该运行模型允许APP与各个Thing独立开发和更新,同时结构和功能的调整无须代码重新编译,而是通过修改文本配置实现。
该模型虽然带来了更多的功能和适应性,但同时也增加了运行维护的难度,手动运维将导致低效易错。为了使开发、部署和运维全过程均能满足敏捷开发的需求,控制系统采用统一版本管理、自动化部署、集中式运维等DevOps实践,从而显著提升软件交付与运维效率,同时减少人为干预,确保系统的稳定性和可靠性。
6.2 统一版本管理
控制系统采用如图11所示的架构实现对代码、程序、脚本与元数据的统一版本管理。
图11
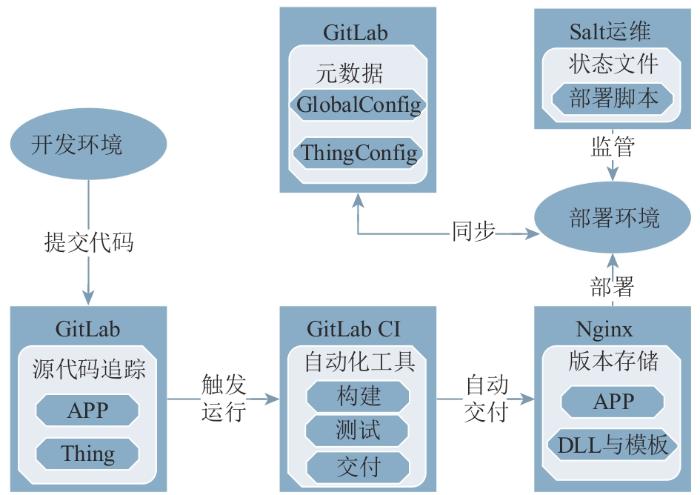
通过统一版本管理,控制系统中的任意服务可以在任意阶段实现版本回退,从而确保系统整体能够高效且稳定地进行更新迭代。
6.3 自动化部署
自动化部署基于版本管理和部署脚本实现,分为元数据部署和程序部署2个阶段。
在元数据部署阶段,支持空白、迁移与更新3种部署形式。空白部署需新建空白元数据与远程仓库,并将远程仓库URI和APP默认版本号录入元数据中;迁移部署需根据提供的远程仓库URI拉取其元数据到本地;更新部署支持本地更新或远程更新,需要通过推送或拉取使得本地仓库与远程仓库状态一致。
程序部署阶段的行为一致,脚本需要根据元数据配置,拉取或更新指定版本的APP和依赖DLL。指定版本Thing的配置模板会与依赖DLL同时被拉取到Thing Dll,为Thing Config修改提供参考。
自动化部署在依赖版本管理的同时,通过元数据同步进一步强化了版本控制的效果。
6.4 集中运维管理
实验环境下,各项服务根据控制需求分布在Windows物理机、Ubuntu物理机或Docker容器中。为高效运维在混合部署环境下的分布式控制系统,采用分布式远程执行工具Salt[27]实现集中运维管理。
Salt基于基础设施即代码理念,通过代码化方式管理和配置计算资源。Salt采用主从架构,从节点可通过Grains存储部署环境、IP地址等静态信息,主节点根据这些信息对从节点进行分类管理。在主从架构配置完毕后,主节点通过定义并分发状态文件到各从节点,远程控制从节点按照定义配置执行基础设施搭建、统一部署更新与服务注册运行等任务,如表3所示。
表3 基于Salt状态文件的运维管理功能
Tab. 3
| 状态文件 | 运维管理功能 |
|---|---|
| 描述CFET服务所需基础设施,包括.NET与Git等 | 确保基础设施环境的一致性和可预测性 |
| 定义应用程序的代码库位置、依赖项和服务配置 | 实现应用程序的自动化部署和更新 |
| 定义服务注册的配置和运行参数 | 节点上的服务能够自动注册到系统中 |
| 定义被监控的服务 | 监控和维护服务运行 |
7 结论
磁约束氘氘聚变中子源预研装置的结构复杂化与放电精密化对控制提出了更高要求,需要基于HFRC建设经验针对性完成重构设计。预研装置控制系统沿用并优化CFET控制框架,提升安全性、稳定性与效率等综合特性。控制系统提供安全联锁、脉冲控制与综合数据服务,并通过集成控制将各服务协调集成到自动化执行的放电流程中,同时新增多项资源拓展应用和DevOps工具,提升科研与运维效率。后续将根据该设计方案实施具体的开发部署工作,并在建设过程中持续完善该设计,为长周期合作建设的复杂聚变装置提供有效的控制系统建设方案。
参考文献
Scoping of material response under DEMO neutron irradiation:comparison with fission and influence of nuclear library selection
[J].
Evaluation of irradiation facility options for fusion materials research and development
[J].
Summary of the 3rd international workshop on gas-dynamic trap based fusion neutron source (GDT-FNS)
[J].
A new device concept of magnetic confinement deuterium-deuterium fusion
[J].
Design of high voltage pulsed power supply for HFRC
[J].
Design and implement of control system for HUST field-reversed configuration device
[J].
Designing CODAC system for tokamaks using web technology
[J].
A full stack data acquisition,archive and access solution for J-TEXT based on web technologies
[J].
The ITER CODAC network design
[J].
ITER controls approaching one million integrated EPICS process variables
[C]//
Implementing DevOps practices at the control and data acquisition system of an experimental fusion device
[J].
Management of EPICS IOCs in a distributed network environment using salt
[C]//
Software quality management approach for WEST CODAC
[J].
A qualitative study of DevOps usage in practice
[J].
Access control and session management in the HTTP environment
[J].
WebSocket in real time application
[J].
Internet of things:survey and open issues of MQTT protocol
[C]//
A survey on networked data streaming with apache kafka
[J].
Trends in industrial communication and OPC UA
[C]//
A case study on parallel HDF5 dataset concatenation for high energy physics data analysis
[J].
Exploring MDSplus data-acquisition software and custom devices
[J].
An implementation of power IoT time series data based on influxDB
[C]//
Continuous integration,delivery and deployment:a systematic review on approaches,tools,challenges and practices
[J].
NGINX:the high-performance web server and reverse proxy
[J].
Automated network configuration:a comparison between ansible,puppe,and saltstack for network configuration
[R].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}