0 引言
近年来,包含多种分布式电源的虚拟电厂和微电网系统得到了广泛研究[1 -5 ] 。以包含风电和光伏的发电系统为例,世界上许多国家已经建立了相关的实用系统[6 -7 ] 。
一个虚拟电厂系统可分为物理层和控制层。物理层包含系统必要的基础设施,可由光伏、风力涡轮机、分布式发电(distributed generator,DG)单元以及负载组成。控制层内置针对各发电单元的运行策略及控制算法[8 ] ,如风力发电机和光伏发电设备通常采用最大功率点跟踪控制方法。然而,由于风电和光伏发电的输出具有波动性及间歇性,随着天气条件的变化,系统功率的缺额必须由火电等调峰电源补充。因此,针对DG的控制方法进行研究十分必要。
目前针对DG单元所采用的初级控制常常会导致频率和电压偏差,因此需要采用二级控制来进一步调节[9 -10 ] 。集中式控制方法是二级控制的传统方法,它避免了偏差,但其复杂的信息传输网络结构降低了集中式控制器的可靠性,提高了故障灵敏度[11 -12 ] 。
为了避免上述问题,分布式协同控制策略成为另一种选择。文献[13 -14 ]首次提出了基于分布式协同控制策略的二次控制方法。文献[15 ]提出了一种基于一致性的两级分布式控制框架。文献[16 ]实现了加权一致的减载协议,以保持孤岛系统的稳定。文献[17 ]提出了一种在有限时间内实现频率和电压恢复的二次控制方法。
本文针对虚拟电厂的运行及系统中DG单元控制问题开展研究。首先针对虚拟电网发电问题提出了一种基于功率差余值的运行策略,保证虚拟电网在不同工况下的安全运行。然后针对系统中DG的发电控制问题设计了一种分布式有限时间二级控制方案,在有限时间内消除初级控制偏差,保证频率和电压恢复到标称值并实现了有功功率在各DG单元间的分配。最后,通过仿真实验,验证本文所提控制方法的可行性及其对模型参数不确定性和负载变化的鲁棒性。
1 虚拟电厂运行策略
虚拟电厂中的风力发电机组和光伏发电系统受到天气因素的影响,其出力存在间歇性和随机性等特点,将导致系统功率频繁波动。同时,负载端的需求变化会使得系统中各单元的工作状态频繁改变,严重影响系统的稳定性和安全性。因此,为系统制定合理的运行策略以提高系统的动态稳定性十分必要。
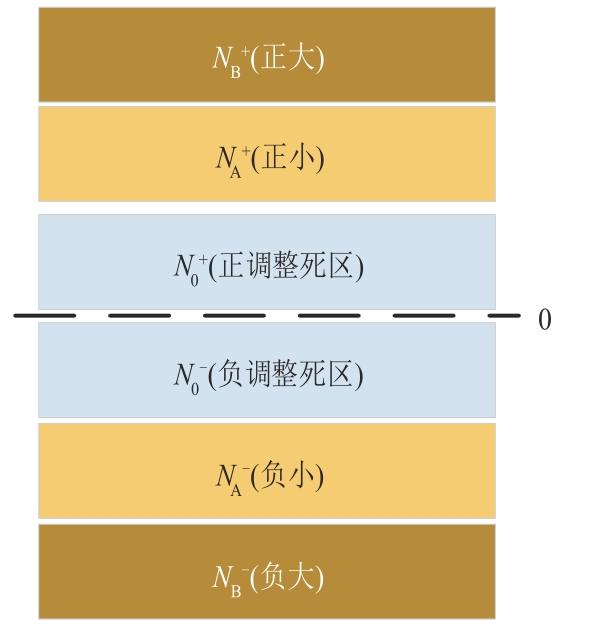
考虑到系统中各供能单元的不同动态调节特性,本研究根据风力发电功率P wind 、光伏发电功率P pv 与负载调度需求功率P l 得到系统功率差余值N c
N c = P l - P w i n d - P p v (1)
根据图1 所示的方法,将系统功率差余值分为6个阈值区间以表示系统不同程度的功率波动情况,分别为N B + (正大)、N A + (正小)、N 0 + (正调整死区)、N 0 - (负调整死区)、N A - (负小)、N B - (负大)。
图1
图1
差余值N c 的区间划分
Fig. 1
Interval partition of N c
当差余值满足N 0 - ≤N c ≤N 0 + 时,表明系统供需失衡程度非常小,系统通过自身惯性即可保证稳定,不需要分布式发电机承担调节波动。
当差余值满足N 0 + ≤ N c ≤ N A +
当差余值满足N A + ≤ N c ≤ N B +
当差余值满足N A - ≤ N c ≤ N 0 -
当差余值满足N B - ≤ N c ≤ N A -
2 DG单元控制
2.1 初级控制
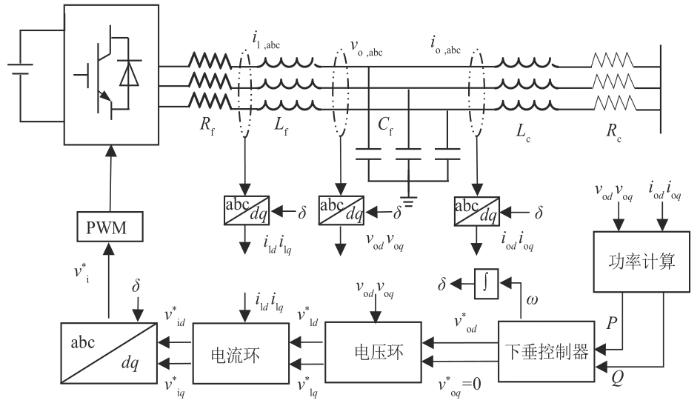
下垂控制方法作为一种常用的初级控制策略,可以实现各DG单元自主控制。因此,本研究采用下垂控制方法对基于逆变器的可控DG机组进行局部一次控制,在负载变化时局部调整频率和电压幅值,同时根据下垂系数保证DG之间适当的功率共享。
本研究中初级控制的基本原理如图2 所示,由功率控制器和电压电流控制器[6 ] 组成。图中δ i l d i l q v o d v o q i o d i o q i l , a b c v o , a b c i o , a b c
图2
图2
初级控制结构
Fig. 2
Structure of primary control
ω i = ω n i - m P i v o d i * = V n i - n Q i v o q i * = 0 (2)
式中:m n ω n i V n i P i Q i ω i v o d i * V i = v o d i * 2 + v o q i * 2 V i v o d i *
2.2 二级控制
由于下垂控制存在控制偏差,需要二级控制消除初级控制带来的频率及电压偏差。考虑到DG单元的分布式特点,本文将二级控制问题转化为多智能体同步跟踪问题,利用各DG单元间的信息交互,采用分布式算法实现二次控制[7 ] 。
2.2.1 图论
DG网络的通信拓扑可以用包含领导者的无向图𝒢 ¯ = 𝒢 { 0 } 0 𝒢 = ( 𝒱 , ε , 𝒜 ) 𝒱 = { 1,2 , ⋯ , N } N 个agent的非空有限集,每个agent代表一个DG。ε ⊂ 𝒱 × 𝒱 i , j ) 用于表示从节点i j j i 𝒜 = [ a i j ] ∈ R n × n 𝒢 a i j i , j ) 的权值,若( i , j ) ∈ ε a i j = a j i > 0 D = d i a g { d i } ∈ R N × N d i = ∑ j = 1 N a i j 𝒢 L = D - 𝒜 B = d i a g { b 1 , ⋯ , b N } ∈ R N × N i b i > 0 b i = 0 H = L + B
2.2.2 二级控制器设计
假设1:至少有一个追随者可以访问领导者所提供的信息,且无向图𝒢
z ˙ ( t ) = f ( z ( t ) ) , z ( 0 ) = z 0 (3)
式中:z ∈ R n f ( · ) f ( 0 ) = 0 V ( z ) : R n → R 0 + a > 0 c > 0 β ∈ ( 0,1 )
V ˙ ( z ) + a [ V ( z ) ] + c [ V ( z ) ] β ≤ 0 , z ∈ R n \ { 0 } (4)
成立,则称系统原点是快速有限时间稳定的,稳定时间可以表示为
T ≤ 1 a ( 1 - β ) l n { a V [ z ( 0 ) ] 1 - β + c c } (5)
为了恢复频率并保证功率共享,对下垂方程求导,以频率变化率和有功功率为控制变量,设置辅助控制输入K ℏ K ƛ
ω ˙ n i = K ℏ + K ƛ , i = 1,2 , 3 , ⋯ , N (6)
K ℏ = - χ ε i - ς s i g { ε i } α (7)
K ƛ = 𝓁 ∑ j = 1 N a i j s i g ( ϖ j - ϖ i ) α =
𝓁 ∑ j = 1 N a i j s i g ( ϖ j - ϖ i ) ϖ j - ϖ i α (8)
式中:ε i = ∑ j = 1 N a i j ( ω i - ω j ) + b i ( ω i - ω r e f ) χ > 0 ς > 0 α ∈ ( 0,1 ) ϖ i = m i P i i ∈ { 1,2 , ⋯ , N } 𝓁
定理1:假设1成立,则控制算法(7)和(8)可以实现频率ω r e f
证明:定义错误变量ω ¯ i = ω i - ω r e f
ω ¯ ˙ i = - χ ε i - ς s i g { ε i } α (9)
令ω ¯ = ( ω ¯ 1 , ω ¯ 2 , ⋯ , ω ¯ N ) T 式(9)的增广系统可表示为
ω ¯ ˙ = - χ H ω ¯ - ς s i g { H ω ¯ } α (10)
假设存在一个正交矩阵U ∈ R n × n U H U T = J = d i a g ( λ 1 , λ 2 , ⋯ , λ N ) 。
V ω = ω ¯ T H ω ¯ (11)
V ˙ ω = - 2 χ ω ¯ T H 2 ω ¯ - 2 ς ω ¯ T H s i g H ω ¯ α =
- 2 χ ω ˜ T J 2 ω ˜ - 2 ς ξ T s i g { ξ } α =
- 2 χ ∑ i = 1 N λ i 2 ω i 2 - 2 ς ξ T s i g { ξ } α (12)
- 2 χ ∑ i = 1 N λ i 2 ω i 2 ≤ - 2 χ λ 2 m i n H ∑ i = 1 N ω i 2 ≤
- 2 χ λ 2 m i n H λ m a x H V ω (13)
- 2 ς ξ T s i g { ξ } α ≤ - 2 ς ( λ m i n H 2 ω ¯ T ω ¯ ) 1 + α 2 ≤
- 2 ς ( λ m i n H 2 λ m a x H ) 1 + α 2 V ω 1 + α 2 (14)
V ˙ ω ≤ - 2 χ λ 2 m i n H λ m a x H V ω - 2 ς ( λ m i n H 2 λ m a x H ) 1 + α 2 V ω 1 + α 2 (15)
根据引理2,可知ω ¯ = 0 K ƛ
为消除初级控制引起的电压偏差,对下垂方程求导,以电压变化率为控制变量,设置如下辅助控制K v
K v = - ι ξ i - γ s i g { ξ i } α (16)
式中:ξ i = ∑ j = 1 N a i j ( V i - V j ) + b i ( V i - V r e f ) ι > 0 γ > 0 α ∈ ( 0,1 )
定理2:假设1成立,则控制算法(16)能在有限时间内实现电压快速收敛到额定电压V r e f
T ≤ T * ≜ λ m a x H 2 1 - α ι λ 2 m i n ( H ) ·
l n [ ι λ 2 m i n H γ λ m a x H ( λ m i n H 2 λ m a x H ) 1 + α 2 V v ( 0 ) 1 - α + 1 ] (17)
令V ¯ = ( V ¯ 1 , V ¯ 2 , ⋯ , V ¯ N ) T
V ¯ ˙ = - ι H V ¯ - γ s i g { H V ¯ } α (18)
V v = V ¯ T H V ¯ (19)
V ˙ v = - 2 ι V ¯ T H 2 V ¯ - 2 γ V ¯ T H s i g { H V ¯ } α
- 2 ι V ˜ T J 2 V ˜ - 2 γ ζ T s i g { ζ } α =
- 2 ι ∑ i = 1 N λ i 2 V i 2 - 2 γ ζ T s i g { ζ } α (20)
V ˙ v ≤ - 2 ι λ 2 m i n H λ m a x H V v - 2 γ ( λ m i n H 2 λ m a x H ) 1 + α 2 V v 1 + α 2 (21)
根据引理2,V ¯ = 0 式(17),证明完成。
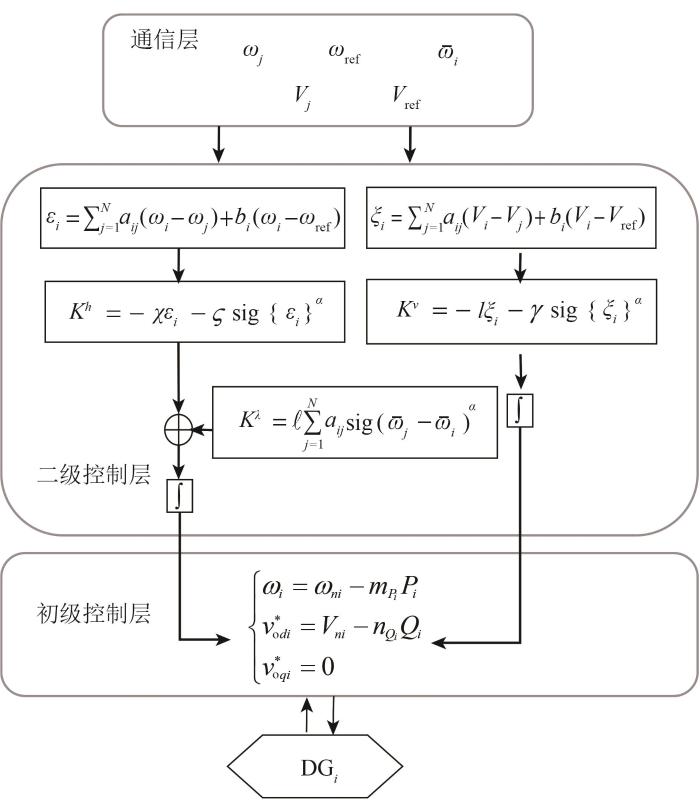
综上所述,分布式二级控制方案如图3 所示。DG i j
图3
图3
二级控制结构
Fig. 3
Structure of secondary control
3 仿真实验
为验证本文所提出的分布式二级控制方法的可行性,并探究其在负荷变化和模型参数不确定情况下的鲁棒性能,本研究搭建了一个包含4个DG单元并联的仿真系统,标准电压设置为380 V,频率为50 Hz,仿真系统中的主要参数如表1 所示。
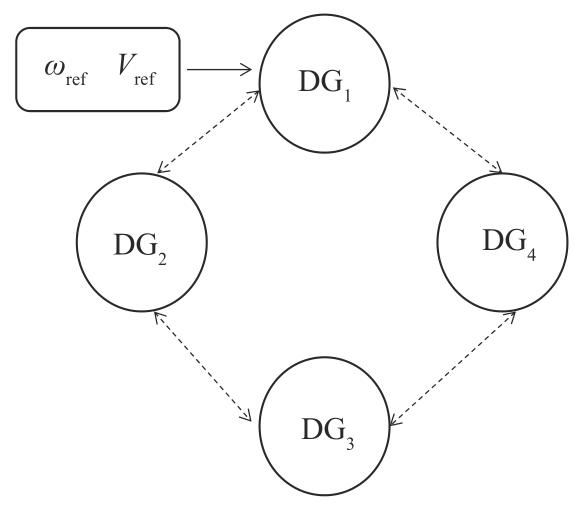
DG单元的通信拓扑结构如图4 所示,4个DG单元可两两进行通信,并由DG1 接收虚拟领导者所提供的标准频率和标准电压信息。
图4
图4
DG单元的通信拓扑结构
Fig. 4
Communication topology of DG
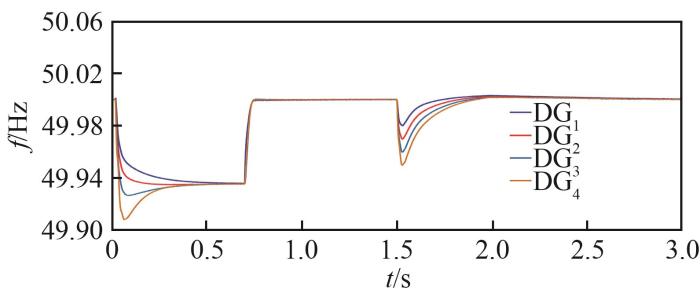
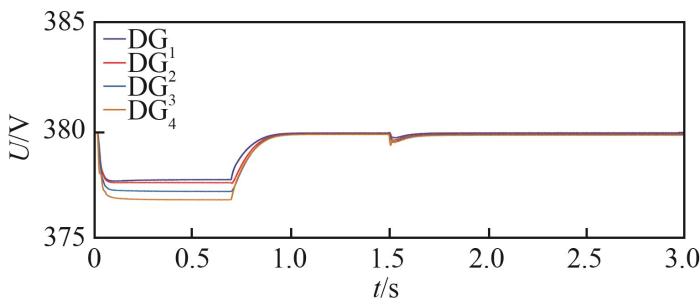
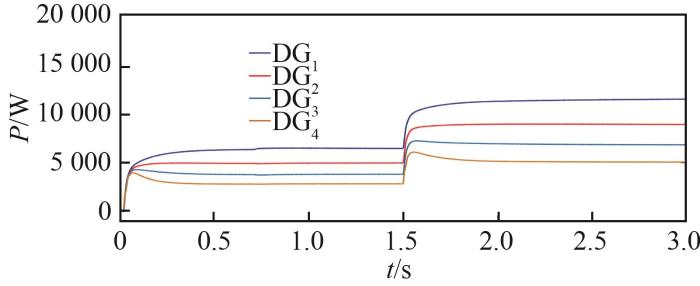
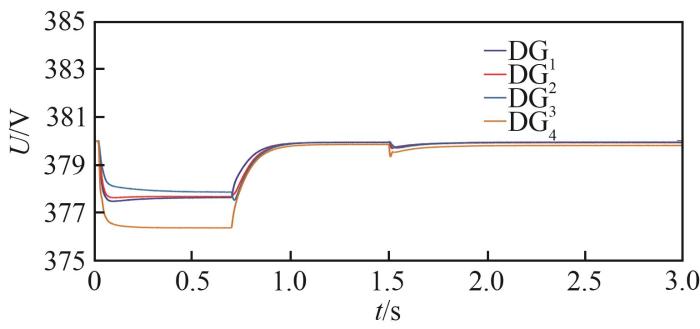
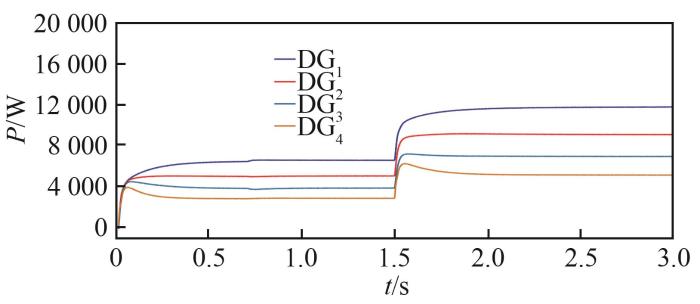
最初,各DG单元仅由初级控制器控制,系统中连接一个20 kW的负载。在t =1 s时采用本研究的分布式二级控制策略。t =1.5 s时负载端增加15 kW负荷。仿真结果如图5 —7 所示。
图5
图5
频率仿真结果
Fig. 5
Simulation results of frequency
图6
图6
电压仿真结果
Fig. 6
Simulation results of voltage
图7
图7
有功功率仿真结果
Fig. 7
Simulation results of active power
由上述仿真结果可以看出,在仅使用初级控制时,各DG单元的频率和电压会发生偏差。加入分布式二级控制后,频率和电压在很短的时间恢复到额定值。此外,即使负荷发生变化,DG单元的频率和电压也可迅速恢复到预期值并保持有功功率分配,说明该控制方案仍然有效。需要强调的是,由于线路阻抗的存在,系统必然存在一定的消耗。
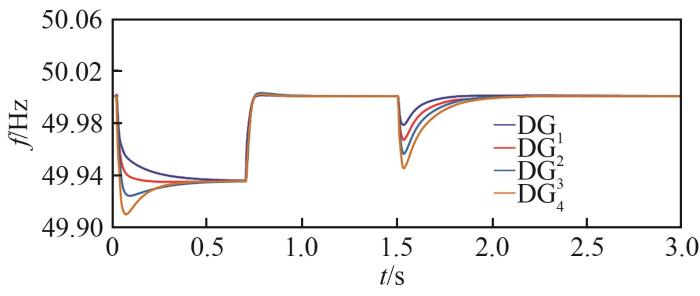
为了进一步检验该方法针对参数扰动下的鲁棒性,在各参数条件保持不变的情况下,将线阻抗调整为10%~30%的随机波动。仿真结果如图8 —10 所示。
图8
图8
扰动下的频率
Fig. 8
Frequency under disturbance
图9
图9
扰动下的电压
Fig. 9
Voltage under disturbance
图10
图10
扰动下的有功功率
Fig. 10
Active power under disturbance
从仿真结果可以看出,即使存在参数扰动,所提控制方法也能将电压和频率迅速恢复到期望值,并实现有功功率分配,说明所提控制方法对系统扰动具有良好鲁棒性。
4 结论
针对虚拟电厂的运行及系统中DG单元控制问题开展研究,主要结论如下:
1)针对虚拟电厂发电问题,提出了一种基于新能源功率与需求平衡的运行策略。该策略充分考虑到虚拟电厂中各供能单元的不同动态调节特性,根据风力发电功率、光伏发电功率与负载调度需求功率得到系统功率差余值,基于差余值设计了不同工况下的系统运行策略。与以往研究相比,提出的运行策略对系统工况进行了更为详细的划分,有效提高了系统的稳定性和安全性。
2)针对系统中的DG单元,提出了一种分布式有限时间二级控制方案,在有限时间内迅速恢复初级控制所引起的频率和电压偏差,并实现了有功功率共享。与以往的研究相比,所提出的方法仅需要稀疏通信网络,并可在有限时间内恢复频率和电压幅值,具有更好的控制性能。
参考文献
View Option
[1]
[本文引用: 1]
XUAN W B LI H LIU Z Y et al A method for improving the accommodating capability of urban renewable energy based on virtual power plant technology
[J].Power Generation Technology ,2021 ,42 (3 ):289 -297 . doi:10.12096/j.2096-4528.pgt.20104
[本文引用: 1]
[2]
ZHAO J L XIANG J N TANG Z F et al Practice exploration and prospect analysis of virtual power plant in Shanghai
[J].Electric Power ,2023 ,56 (2 ):1 -13 . doi:10.11930/j.issn.1004-9649.202208078
[3]
张天翼 ,郑凯元 ,王海风 聚合相同分布式电源对直流微电网高频振荡稳定性的影响
[J].中国电力 ,2021 ,54 (8 ):103 -108 .
ZHANG T Y ZHENG K Y WANG H F Impact of large number of same aggregated distributed generators on the high-frequency oscillatory stability of a DC microgrids
[J].Electric Power ,2021 ,54 (8 ):103 -108 .
[4]
HUO L ZHANG Y B CHEN X Artificial intelligence applications in distributed energy storage technologies
[J].Power Generation Technology ,2022 ,43 (5 ):707 -717 . doi:10.12096/j.2096-4528.pgt.22109
[6]
王睿 ,孙秋野 ,张化光 微电网的电流均衡/电压恢复自适应动态规划策略研究
[J].自动化学报 ,2022 ,48 (2 ):479 -491 .
[本文引用: 2]
WANG R SUN Q Y ZHANG H G Research on current sharing/voltage recovery based adaptive dynamic programming control strategy of microgrids
[J].Acta Automatica Sinica ,2022 ,48 (2 ):479 -491 .
[本文引用: 2]
[7]
MEHRJERDI H HEMMATI R SHAFIE-KHAH M et al Zero energy building by multicarrier energy systems including hydro,wind, solar, and hydrogen
[J].IEEE Transactions on Industrial Informatics , 2021 ,17 (8 ):5474 -5484 . doi:10.1109/tii.2020.3034346
[本文引用: 2]
[8]
[本文引用: 1]
YANG J X WANG J H WANG M et al Research on virtual inertial control strategy of DC microgrid with photovoltaic and storage system based on passivity-based control
[J].Power Generation Technology ,2021 ,42 (5 ):576 -584 . doi:10.12096/j.2096-4528.pgt.20080
[本文引用: 1]
[9]
NIMA M D NASSER S MOHSEN H Fully distributed cooperative secondary frequency and voltage control of islanded microgrids
[J].IEEE Transactions on Energy Conversion ,2017 ,32 (2 ):675 -685 . doi:10.1109/tec.2016.2638858
[本文引用: 1]
[10]
MICHELE C GIAN P I ANTONELLA F Decentralized sliding mode control of islanded AC microgrids with arbitrary topology
[J].IEEE Transactions on Industrial Electronics ,2017 ,64 (8 ):6706 -6713 . doi:10.1109/tie.2017.2694346
[本文引用: 1]
[11]
XIA S W BU S Q WAN C et al A fully distributed hierarchical control framework for coordinated operation of DERs in active distribution power networks
[J].IEEE Transactions on Power Systems ,2019 ,34 (6 ):5184 -5197 . doi:10.1109/tpwrs.2018.2870153
[本文引用: 1]
[12]
HU J Y BHOWMICK P A consensus-based robust secondary voltage and frequency control scheme for islanded microgrids
[J].IEEE Transactions on Power Systems ,2020 ,116 :105575 . doi:10.1016/j.ijepes.2019.105575
[本文引用: 1]
[13]
BIDRAM A DAVOUDI A FRANK L et al Secondary control of microgrids based on distributed cooperative control of multi-agent systems
[J].IET Generation Transmission & Distribution ,2013 ,7 (8 ):822 -831 . doi:10.1049/iet-gtd.2012.0576
[本文引用: 1]
[14]
BIDRAM A DAVOUDI A FRANK L et al Cooperative secondary control of microgrids using feedback linearization
[J].IEEE Transactions on Power Systems ,2013 ,28 (3 ):3462 -3470 . doi:10.1109/tpwrs.2013.2247071
[本文引用: 1]
[15]
ZHOU Q TIAN Z MOHAMMAD S et al Optimal consensus-based distributed control strategy for coordinated operation of networked microgrids
[J].IEEE Transactions on Power Systems ,2020 ,35 (3 ):2452 -2462 . doi:10.1109/tpwrs.2019.2954582
[本文引用: 1]
[16]
XIE J LIU C C MARINO S et al Consensus weighting of a multi-agent system for load shedding
[J].International Journal of Electrical Power & Energy Systems ,2020 ,117 :105615 . doi:10.1016/j.ijepes.2019.105615
[本文引用: 1]
[17]
XU Y L SUN H B GU W et al Optimal distributed control for secondary frequency and voltage regulation in an islanded microgrid
[J].IEEE Transactions on Industrial Informatics ,2019 ,15 (1 ):225 -235 . doi:10.1109/tii.2018.2795584
[本文引用: 1]
[18]
KHOO S Y XIE L H ZHAO S K et al Multi-surface sliding control for fast finite-time leader-follower consensus with high order SISO uncertain nonlinear agents
[J].International Journal of Robust and Nonlinear Control ,2014 ,24 (16 ):2388 -2404 . doi:10.1002/rnc.2997
[本文引用: 1]
一种基于虚拟电厂技术的城市可再生能源消纳能力提升方法
1
2021
... 近年来,包含多种分布式电源的虚拟电厂和微电网系统得到了广泛研究[1 -5 ] .以包含风电和光伏的发电系统为例,世界上许多国家已经建立了相关的实用系统[6 -7 ] . ...
A method for improving the accommodating capability of urban renewable energy based on virtual power plant technology
1
2021
... 近年来,包含多种分布式电源的虚拟电厂和微电网系统得到了广泛研究[1 -5 ] .以包含风电和光伏的发电系统为例,世界上许多国家已经建立了相关的实用系统[6 -7 ] . ...
Practice exploration and prospect analysis of virtual power plant in Shanghai
0
2023
聚合相同分布式电源对直流微电网高频振荡稳定性的影响
0
2021
Impact of large number of same aggregated distributed generators on the high-frequency oscillatory stability of a DC microgrids
0
2021
Artificial intelligence applications in distributed energy storage technologies
0
2022
基于改进下垂控制的直流微网运行研究
1
2021
... 近年来,包含多种分布式电源的虚拟电厂和微电网系统得到了广泛研究[1 -5 ] .以包含风电和光伏的发电系统为例,世界上许多国家已经建立了相关的实用系统[6 -7 ] . ...
Research on DC microgrid operation based on improved droop control
1
2021
... 近年来,包含多种分布式电源的虚拟电厂和微电网系统得到了广泛研究[1 -5 ] .以包含风电和光伏的发电系统为例,世界上许多国家已经建立了相关的实用系统[6 -7 ] . ...
微电网的电流均衡/电压恢复自适应动态规划策略研究
2
2022
... 近年来,包含多种分布式电源的虚拟电厂和微电网系统得到了广泛研究[1 -5 ] .以包含风电和光伏的发电系统为例,世界上许多国家已经建立了相关的实用系统[6 -7 ] . ...
... 本研究中初级控制的基本原理如图2 所示,由功率控制器和电压电流控制器[6 ] 组成.图中δ i l d i l q v o d v o q i o d i o q i l , a b c v o , a b c i o , a b c
Research on current sharing/voltage recovery based adaptive dynamic programming control strategy of microgrids
2
2022
... 近年来,包含多种分布式电源的虚拟电厂和微电网系统得到了广泛研究[1 -5 ] .以包含风电和光伏的发电系统为例,世界上许多国家已经建立了相关的实用系统[6 -7 ] . ...
... 本研究中初级控制的基本原理如图2 所示,由功率控制器和电压电流控制器[6 ] 组成.图中δ i l d i l q v o d v o q i o d i o q i l , a b c v o , a b c i o , a b c
Zero energy building by multicarrier energy systems including hydro,wind, solar, and hydrogen
2
2021
... 近年来,包含多种分布式电源的虚拟电厂和微电网系统得到了广泛研究[1 -5 ] .以包含风电和光伏的发电系统为例,世界上许多国家已经建立了相关的实用系统[6 -7 ] . ...
... 由于下垂控制存在控制偏差,需要二级控制消除初级控制带来的频率及电压偏差.考虑到DG单元的分布式特点,本文将二级控制问题转化为多智能体同步跟踪问题,利用各DG单元间的信息交互,采用分布式算法实现二次控制[7 ] . ...
基于无源控制的光储直流微网虚拟惯性控制策略研究
1
2021
... 一个虚拟电厂系统可分为物理层和控制层.物理层包含系统必要的基础设施,可由光伏、风力涡轮机、分布式发电(distributed generator,DG)单元以及负载组成.控制层内置针对各发电单元的运行策略及控制算法[8 ] ,如风力发电机和光伏发电设备通常采用最大功率点跟踪控制方法.然而,由于风电和光伏发电的输出具有波动性及间歇性,随着天气条件的变化,系统功率的缺额必须由火电等调峰电源补充.因此,针对DG的控制方法进行研究十分必要. ...
Research on virtual inertial control strategy of DC microgrid with photovoltaic and storage system based on passivity-based control
1
2021
... 一个虚拟电厂系统可分为物理层和控制层.物理层包含系统必要的基础设施,可由光伏、风力涡轮机、分布式发电(distributed generator,DG)单元以及负载组成.控制层内置针对各发电单元的运行策略及控制算法[8 ] ,如风力发电机和光伏发电设备通常采用最大功率点跟踪控制方法.然而,由于风电和光伏发电的输出具有波动性及间歇性,随着天气条件的变化,系统功率的缺额必须由火电等调峰电源补充.因此,针对DG的控制方法进行研究十分必要. ...
Fully distributed cooperative secondary frequency and voltage control of islanded microgrids
1
2017
... 目前针对DG单元所采用的初级控制常常会导致频率和电压偏差,因此需要采用二级控制来进一步调节[9 -10 ] .集中式控制方法是二级控制的传统方法,它避免了偏差,但其复杂的信息传输网络结构降低了集中式控制器的可靠性,提高了故障灵敏度[11 -12 ] . ...
Decentralized sliding mode control of islanded AC microgrids with arbitrary topology
1
2017
... 目前针对DG单元所采用的初级控制常常会导致频率和电压偏差,因此需要采用二级控制来进一步调节[9 -10 ] .集中式控制方法是二级控制的传统方法,它避免了偏差,但其复杂的信息传输网络结构降低了集中式控制器的可靠性,提高了故障灵敏度[11 -12 ] . ...
A fully distributed hierarchical control framework for coordinated operation of DERs in active distribution power networks
1
2019
... 目前针对DG单元所采用的初级控制常常会导致频率和电压偏差,因此需要采用二级控制来进一步调节[9 -10 ] .集中式控制方法是二级控制的传统方法,它避免了偏差,但其复杂的信息传输网络结构降低了集中式控制器的可靠性,提高了故障灵敏度[11 -12 ] . ...
A consensus-based robust secondary voltage and frequency control scheme for islanded microgrids
1
2020
... 目前针对DG单元所采用的初级控制常常会导致频率和电压偏差,因此需要采用二级控制来进一步调节[9 -10 ] .集中式控制方法是二级控制的传统方法,它避免了偏差,但其复杂的信息传输网络结构降低了集中式控制器的可靠性,提高了故障灵敏度[11 -12 ] . ...
Secondary control of microgrids based on distributed cooperative control of multi-agent systems
1
2013
... 为了避免上述问题,分布式协同控制策略成为另一种选择.文献[13 -14 ]首次提出了基于分布式协同控制策略的二次控制方法.文献[15 ]提出了一种基于一致性的两级分布式控制框架.文献[16 ]实现了加权一致的减载协议,以保持孤岛系统的稳定.文献[17 ]提出了一种在有限时间内实现频率和电压恢复的二次控制方法. ...
Cooperative secondary control of microgrids using feedback linearization
1
2013
... 为了避免上述问题,分布式协同控制策略成为另一种选择.文献[13 -14 ]首次提出了基于分布式协同控制策略的二次控制方法.文献[15 ]提出了一种基于一致性的两级分布式控制框架.文献[16 ]实现了加权一致的减载协议,以保持孤岛系统的稳定.文献[17 ]提出了一种在有限时间内实现频率和电压恢复的二次控制方法. ...
Optimal consensus-based distributed control strategy for coordinated operation of networked microgrids
1
2020
... 为了避免上述问题,分布式协同控制策略成为另一种选择.文献[13 -14 ]首次提出了基于分布式协同控制策略的二次控制方法.文献[15 ]提出了一种基于一致性的两级分布式控制框架.文献[16 ]实现了加权一致的减载协议,以保持孤岛系统的稳定.文献[17 ]提出了一种在有限时间内实现频率和电压恢复的二次控制方法. ...
Consensus weighting of a multi-agent system for load shedding
1
2020
... 为了避免上述问题,分布式协同控制策略成为另一种选择.文献[13 -14 ]首次提出了基于分布式协同控制策略的二次控制方法.文献[15 ]提出了一种基于一致性的两级分布式控制框架.文献[16 ]实现了加权一致的减载协议,以保持孤岛系统的稳定.文献[17 ]提出了一种在有限时间内实现频率和电压恢复的二次控制方法. ...
Optimal distributed control for secondary frequency and voltage regulation in an islanded microgrid
1
2019
... 为了避免上述问题,分布式协同控制策略成为另一种选择.文献[13 -14 ]首次提出了基于分布式协同控制策略的二次控制方法.文献[15 ]提出了一种基于一致性的两级分布式控制框架.文献[16 ]实现了加权一致的减载协议,以保持孤岛系统的稳定.文献[17 ]提出了一种在有限时间内实现频率和电压恢复的二次控制方法. ...
Multi-surface sliding control for fast finite-time leader-follower consensus with high order SISO uncertain nonlinear agents
1
2014






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}