平抑高比例新能源发电功率波动的风-光-储容量最优配比
1
2023
... 大力发展以风电和太阳能发电为代表的新能源发电技术是我国实现“双碳”目标的主要手段[1-3].随着风电与太阳能发电占比的不断提升,我国提出了“构建以新能源为主体的新型电力系统”的战略目标[4-5].这一目标要求风电等新能源应具有对电网主动支撑的能力,即要求风电机组应具有较好的故障穿越能力[6-7]. ...
Optimal ratio of wind-solar-storage capacity for mitigating the power fluctuations in power system with high penetration of renewable energy power generation
1
2023
... 大力发展以风电和太阳能发电为代表的新能源发电技术是我国实现“双碳”目标的主要手段[1-3].随着风电与太阳能发电占比的不断提升,我国提出了“构建以新能源为主体的新型电力系统”的战略目标[4-5].这一目标要求风电等新能源应具有对电网主动支撑的能力,即要求风电机组应具有较好的故障穿越能力[6-7]. ...
面向电力系统调度需求的负荷资源调控技术研究综述
0
2022
A review of load resource scheduling and control geared to the needs of power system scheduling
0
2022
我国分布式能源发展现状及展望
1
2022
... 大力发展以风电和太阳能发电为代表的新能源发电技术是我国实现“双碳”目标的主要手段[1-3].随着风电与太阳能发电占比的不断提升,我国提出了“构建以新能源为主体的新型电力系统”的战略目标[4-5].这一目标要求风电等新能源应具有对电网主动支撑的能力,即要求风电机组应具有较好的故障穿越能力[6-7]. ...
Status and outlook of distributed energy development in China
1
2022
... 大力发展以风电和太阳能发电为代表的新能源发电技术是我国实现“双碳”目标的主要手段[1-3].随着风电与太阳能发电占比的不断提升,我国提出了“构建以新能源为主体的新型电力系统”的战略目标[4-5].这一目标要求风电等新能源应具有对电网主动支撑的能力,即要求风电机组应具有较好的故障穿越能力[6-7]. ...
“双碳” 背景下陕西新型电力系统研究探索
1
2023
... 大力发展以风电和太阳能发电为代表的新能源发电技术是我国实现“双碳”目标的主要手段[1-3].随着风电与太阳能发电占比的不断提升,我国提出了“构建以新能源为主体的新型电力系统”的战略目标[4-5].这一目标要求风电等新能源应具有对电网主动支撑的能力,即要求风电机组应具有较好的故障穿越能力[6-7]. ...
Research exploration of Shaanxi new type power system in the background of “dual carbon”
1
2023
... 大力发展以风电和太阳能发电为代表的新能源发电技术是我国实现“双碳”目标的主要手段[1-3].随着风电与太阳能发电占比的不断提升,我国提出了“构建以新能源为主体的新型电力系统”的战略目标[4-5].这一目标要求风电等新能源应具有对电网主动支撑的能力,即要求风电机组应具有较好的故障穿越能力[6-7]. ...
中国未来电力系统储电网初探
1
2022
... 大力发展以风电和太阳能发电为代表的新能源发电技术是我国实现“双碳”目标的主要手段[1-3].随着风电与太阳能发电占比的不断提升,我国提出了“构建以新能源为主体的新型电力系统”的战略目标[4-5].这一目标要求风电等新能源应具有对电网主动支撑的能力,即要求风电机组应具有较好的故障穿越能力[6-7]. ...
Preliminary study on an energy storage grid for future power system in China
1
2022
... 大力发展以风电和太阳能发电为代表的新能源发电技术是我国实现“双碳”目标的主要手段[1-3].随着风电与太阳能发电占比的不断提升,我国提出了“构建以新能源为主体的新型电力系统”的战略目标[4-5].这一目标要求风电等新能源应具有对电网主动支撑的能力,即要求风电机组应具有较好的故障穿越能力[6-7]. ...
基于PSD-BPA的双馈风电机组分段故障穿越特性及控制模式分析
1
2023
... 大力发展以风电和太阳能发电为代表的新能源发电技术是我国实现“双碳”目标的主要手段[1-3].随着风电与太阳能发电占比的不断提升,我国提出了“构建以新能源为主体的新型电力系统”的战略目标[4-5].这一目标要求风电等新能源应具有对电网主动支撑的能力,即要求风电机组应具有较好的故障穿越能力[6-7]. ...
Analysis of segmented fault ride-through characteristics and control modes of double-fed wind turbines based on PSD-BPA
1
2023
... 大力发展以风电和太阳能发电为代表的新能源发电技术是我国实现“双碳”目标的主要手段[1-3].随着风电与太阳能发电占比的不断提升,我国提出了“构建以新能源为主体的新型电力系统”的战略目标[4-5].这一目标要求风电等新能源应具有对电网主动支撑的能力,即要求风电机组应具有较好的故障穿越能力[6-7]. ...
虚拟阻抗制动可再生能源机组低电压穿越控制
1
2023
... 大力发展以风电和太阳能发电为代表的新能源发电技术是我国实现“双碳”目标的主要手段[1-3].随着风电与太阳能发电占比的不断提升,我国提出了“构建以新能源为主体的新型电力系统”的战略目标[4-5].这一目标要求风电等新能源应具有对电网主动支撑的能力,即要求风电机组应具有较好的故障穿越能力[6-7]. ...
Low voltage ride-through control of a renewable energy unit with virtual impedance braking
1
2023
... 大力发展以风电和太阳能发电为代表的新能源发电技术是我国实现“双碳”目标的主要手段[1-3].随着风电与太阳能发电占比的不断提升,我国提出了“构建以新能源为主体的新型电力系统”的战略目标[4-5].这一目标要求风电等新能源应具有对电网主动支撑的能力,即要求风电机组应具有较好的故障穿越能力[6-7]. ...
双馈式风力发电机低电压穿越技术分析
1
2007
... 电网电压跌落是常见的电网故障之一,在电磁暂态仿真和机组控制领域已经进行了大量的研究[8-10].电网电压跌落通常伴随着电机扭矩的波动与电机转速的突然增大,由于控制系统的响应不及时以及机组惯性的限制,这种突然变化会引起风轮转速和机组载荷的剧烈变化,甚至会出现过载的情况,严重影响风电机组的安全稳定运行.因此,研究低电压穿越(low voltage ride through,LVRT)过程中风电机组性能与关键部件载荷的暂态特性,对保障机组的安全运行具有重要意义[11]. ...
Analysis on the low voltage ride through technology of DFIG
1
2007
... 电网电压跌落是常见的电网故障之一,在电磁暂态仿真和机组控制领域已经进行了大量的研究[8-10].电网电压跌落通常伴随着电机扭矩的波动与电机转速的突然增大,由于控制系统的响应不及时以及机组惯性的限制,这种突然变化会引起风轮转速和机组载荷的剧烈变化,甚至会出现过载的情况,严重影响风电机组的安全稳定运行.因此,研究低电压穿越(low voltage ride through,LVRT)过程中风电机组性能与关键部件载荷的暂态特性,对保障机组的安全运行具有重要意义[11]. ...
含高比例分布式电源的直流配电系统故障恢复过电压机理及其抑制
0
2023
Fault recovery overvoltage mechanism and its suppression in DC distribution system with high-proportion DG penetration
0
2023
电网电压骤降故障下双馈风力发电机建模与控制
1
2006
... 电网电压跌落是常见的电网故障之一,在电磁暂态仿真和机组控制领域已经进行了大量的研究[8-10].电网电压跌落通常伴随着电机扭矩的波动与电机转速的突然增大,由于控制系统的响应不及时以及机组惯性的限制,这种突然变化会引起风轮转速和机组载荷的剧烈变化,甚至会出现过载的情况,严重影响风电机组的安全稳定运行.因此,研究低电压穿越(low voltage ride through,LVRT)过程中风电机组性能与关键部件载荷的暂态特性,对保障机组的安全运行具有重要意义[11]. ...
Modeling and control of DFIG wind energy generation system under grid voltage dip
1
2006
... 电网电压跌落是常见的电网故障之一,在电磁暂态仿真和机组控制领域已经进行了大量的研究[8-10].电网电压跌落通常伴随着电机扭矩的波动与电机转速的突然增大,由于控制系统的响应不及时以及机组惯性的限制,这种突然变化会引起风轮转速和机组载荷的剧烈变化,甚至会出现过载的情况,严重影响风电机组的安全稳定运行.因此,研究低电压穿越(low voltage ride through,LVRT)过程中风电机组性能与关键部件载荷的暂态特性,对保障机组的安全运行具有重要意义[11]. ...
基于超级电容储能的大容量直驱风电机组低电压穿越策略
1
2023
... 电网电压跌落是常见的电网故障之一,在电磁暂态仿真和机组控制领域已经进行了大量的研究[8-10].电网电压跌落通常伴随着电机扭矩的波动与电机转速的突然增大,由于控制系统的响应不及时以及机组惯性的限制,这种突然变化会引起风轮转速和机组载荷的剧烈变化,甚至会出现过载的情况,严重影响风电机组的安全稳定运行.因此,研究低电压穿越(low voltage ride through,LVRT)过程中风电机组性能与关键部件载荷的暂态特性,对保障机组的安全运行具有重要意义[11]. ...
Low voltage ride-through strategy for high-capacity direct-drive wind turbines based on supercapacitor energy storage
1
2023
... 电网电压跌落是常见的电网故障之一,在电磁暂态仿真和机组控制领域已经进行了大量的研究[8-10].电网电压跌落通常伴随着电机扭矩的波动与电机转速的突然增大,由于控制系统的响应不及时以及机组惯性的限制,这种突然变化会引起风轮转速和机组载荷的剧烈变化,甚至会出现过载的情况,严重影响风电机组的安全稳定运行.因此,研究低电压穿越(low voltage ride through,LVRT)过程中风电机组性能与关键部件载荷的暂态特性,对保障机组的安全运行具有重要意义[11]. ...
Real-time simulation of a wind energy system based on the doubly-fed induction generator
1
2009
... 由于电网故障的试验研究会给风电机组的关键部件造成冲击与疲劳载荷,因此数值仿真成为当前研究低电压穿越过程中风电机组特性的主要手段.文献[12]采用MATLAB/Simulink建立了某1.5 MW双馈风电机组的故障穿越仿真模型,为了提高仿真速度,实现实时仿真,机组的气动模型采用了简单~查表法,因而无法计算故障穿越过程中风轮的气动载荷.文献[13]采用PSCAD/EMTDC建立并网仿真模型,对比了恒速恒频风力发电机组及双馈风力发电机组的低电压穿越能力,机组模型也采用了简单~曲线,未考虑风轮气动载荷的变化.文献[14]采用叶素动量(blade element momentum,BEM)方法和Timoshenko梁模型计算机组的气动载荷与结构响应,将某机组在低电压穿越测试过程中的转速与变桨的响应曲线作为输入量,研究了低电压穿越过程中风电机组叶片的振动特性,结果发现叶片挥舞方向的振动增加明显.文献[15]利用Bladed软件搭建了某兆瓦级风电机组模型,并研究了机组在低电压穿越期间关键部件的载荷特性,结果表明,低电压穿越故障对机组塔架载荷有重要影响,且在大风工况下影响更大,由于研究中未进行电气侧建模,因此无法考虑电气模型与机组模型在动态过程中的交互影响. ...
含不同机组风电场低电压穿越能力仿真研究
1
2020
... 由于电网故障的试验研究会给风电机组的关键部件造成冲击与疲劳载荷,因此数值仿真成为当前研究低电压穿越过程中风电机组特性的主要手段.文献[12]采用MATLAB/Simulink建立了某1.5 MW双馈风电机组的故障穿越仿真模型,为了提高仿真速度,实现实时仿真,机组的气动模型采用了简单~查表法,因而无法计算故障穿越过程中风轮的气动载荷.文献[13]采用PSCAD/EMTDC建立并网仿真模型,对比了恒速恒频风力发电机组及双馈风力发电机组的低电压穿越能力,机组模型也采用了简单~曲线,未考虑风轮气动载荷的变化.文献[14]采用叶素动量(blade element momentum,BEM)方法和Timoshenko梁模型计算机组的气动载荷与结构响应,将某机组在低电压穿越测试过程中的转速与变桨的响应曲线作为输入量,研究了低电压穿越过程中风电机组叶片的振动特性,结果发现叶片挥舞方向的振动增加明显.文献[15]利用Bladed软件搭建了某兆瓦级风电机组模型,并研究了机组在低电压穿越期间关键部件的载荷特性,结果表明,低电压穿越故障对机组塔架载荷有重要影响,且在大风工况下影响更大,由于研究中未进行电气侧建模,因此无法考虑电气模型与机组模型在动态过程中的交互影响. ...
Simulation study on low voltage ride-through capability of wind farms with different units
1
2020
... 由于电网故障的试验研究会给风电机组的关键部件造成冲击与疲劳载荷,因此数值仿真成为当前研究低电压穿越过程中风电机组特性的主要手段.文献[12]采用MATLAB/Simulink建立了某1.5 MW双馈风电机组的故障穿越仿真模型,为了提高仿真速度,实现实时仿真,机组的气动模型采用了简单~查表法,因而无法计算故障穿越过程中风轮的气动载荷.文献[13]采用PSCAD/EMTDC建立并网仿真模型,对比了恒速恒频风力发电机组及双馈风力发电机组的低电压穿越能力,机组模型也采用了简单~曲线,未考虑风轮气动载荷的变化.文献[14]采用叶素动量(blade element momentum,BEM)方法和Timoshenko梁模型计算机组的气动载荷与结构响应,将某机组在低电压穿越测试过程中的转速与变桨的响应曲线作为输入量,研究了低电压穿越过程中风电机组叶片的振动特性,结果发现叶片挥舞方向的振动增加明显.文献[15]利用Bladed软件搭建了某兆瓦级风电机组模型,并研究了机组在低电压穿越期间关键部件的载荷特性,结果表明,低电压穿越故障对机组塔架载荷有重要影响,且在大风工况下影响更大,由于研究中未进行电气侧建模,因此无法考虑电气模型与机组模型在动态过程中的交互影响. ...
电压跌落对风力机叶片振动影响分析
1
2016
... 由于电网故障的试验研究会给风电机组的关键部件造成冲击与疲劳载荷,因此数值仿真成为当前研究低电压穿越过程中风电机组特性的主要手段.文献[12]采用MATLAB/Simulink建立了某1.5 MW双馈风电机组的故障穿越仿真模型,为了提高仿真速度,实现实时仿真,机组的气动模型采用了简单~查表法,因而无法计算故障穿越过程中风轮的气动载荷.文献[13]采用PSCAD/EMTDC建立并网仿真模型,对比了恒速恒频风力发电机组及双馈风力发电机组的低电压穿越能力,机组模型也采用了简单~曲线,未考虑风轮气动载荷的变化.文献[14]采用叶素动量(blade element momentum,BEM)方法和Timoshenko梁模型计算机组的气动载荷与结构响应,将某机组在低电压穿越测试过程中的转速与变桨的响应曲线作为输入量,研究了低电压穿越过程中风电机组叶片的振动特性,结果发现叶片挥舞方向的振动增加明显.文献[15]利用Bladed软件搭建了某兆瓦级风电机组模型,并研究了机组在低电压穿越期间关键部件的载荷特性,结果表明,低电压穿越故障对机组塔架载荷有重要影响,且在大风工况下影响更大,由于研究中未进行电气侧建模,因此无法考虑电气模型与机组模型在动态过程中的交互影响. ...
Investigation of voltage sag impact on wind turbine blade vibrations
1
2016
... 由于电网故障的试验研究会给风电机组的关键部件造成冲击与疲劳载荷,因此数值仿真成为当前研究低电压穿越过程中风电机组特性的主要手段.文献[12]采用MATLAB/Simulink建立了某1.5 MW双馈风电机组的故障穿越仿真模型,为了提高仿真速度,实现实时仿真,机组的气动模型采用了简单~查表法,因而无法计算故障穿越过程中风轮的气动载荷.文献[13]采用PSCAD/EMTDC建立并网仿真模型,对比了恒速恒频风力发电机组及双馈风力发电机组的低电压穿越能力,机组模型也采用了简单~曲线,未考虑风轮气动载荷的变化.文献[14]采用叶素动量(blade element momentum,BEM)方法和Timoshenko梁模型计算机组的气动载荷与结构响应,将某机组在低电压穿越测试过程中的转速与变桨的响应曲线作为输入量,研究了低电压穿越过程中风电机组叶片的振动特性,结果发现叶片挥舞方向的振动增加明显.文献[15]利用Bladed软件搭建了某兆瓦级风电机组模型,并研究了机组在低电压穿越期间关键部件的载荷特性,结果表明,低电压穿越故障对机组塔架载荷有重要影响,且在大风工况下影响更大,由于研究中未进行电气侧建模,因此无法考虑电气模型与机组模型在动态过程中的交互影响. ...
兆瓦级风电机组低电压穿越过程运行特性分析
1
2022
... 由于电网故障的试验研究会给风电机组的关键部件造成冲击与疲劳载荷,因此数值仿真成为当前研究低电压穿越过程中风电机组特性的主要手段.文献[12]采用MATLAB/Simulink建立了某1.5 MW双馈风电机组的故障穿越仿真模型,为了提高仿真速度,实现实时仿真,机组的气动模型采用了简单~查表法,因而无法计算故障穿越过程中风轮的气动载荷.文献[13]采用PSCAD/EMTDC建立并网仿真模型,对比了恒速恒频风力发电机组及双馈风力发电机组的低电压穿越能力,机组模型也采用了简单~曲线,未考虑风轮气动载荷的变化.文献[14]采用叶素动量(blade element momentum,BEM)方法和Timoshenko梁模型计算机组的气动载荷与结构响应,将某机组在低电压穿越测试过程中的转速与变桨的响应曲线作为输入量,研究了低电压穿越过程中风电机组叶片的振动特性,结果发现叶片挥舞方向的振动增加明显.文献[15]利用Bladed软件搭建了某兆瓦级风电机组模型,并研究了机组在低电压穿越期间关键部件的载荷特性,结果表明,低电压穿越故障对机组塔架载荷有重要影响,且在大风工况下影响更大,由于研究中未进行电气侧建模,因此无法考虑电气模型与机组模型在动态过程中的交互影响. ...
Analysis on operation characteristics of MW-level wind turbine during low voltage ride through
1
2022
... 由于电网故障的试验研究会给风电机组的关键部件造成冲击与疲劳载荷,因此数值仿真成为当前研究低电压穿越过程中风电机组特性的主要手段.文献[12]采用MATLAB/Simulink建立了某1.5 MW双馈风电机组的故障穿越仿真模型,为了提高仿真速度,实现实时仿真,机组的气动模型采用了简单~查表法,因而无法计算故障穿越过程中风轮的气动载荷.文献[13]采用PSCAD/EMTDC建立并网仿真模型,对比了恒速恒频风力发电机组及双馈风力发电机组的低电压穿越能力,机组模型也采用了简单~曲线,未考虑风轮气动载荷的变化.文献[14]采用叶素动量(blade element momentum,BEM)方法和Timoshenko梁模型计算机组的气动载荷与结构响应,将某机组在低电压穿越测试过程中的转速与变桨的响应曲线作为输入量,研究了低电压穿越过程中风电机组叶片的振动特性,结果发现叶片挥舞方向的振动增加明显.文献[15]利用Bladed软件搭建了某兆瓦级风电机组模型,并研究了机组在低电压穿越期间关键部件的载荷特性,结果表明,低电压穿越故障对机组塔架载荷有重要影响,且在大风工况下影响更大,由于研究中未进行电气侧建模,因此无法考虑电气模型与机组模型在动态过程中的交互影响. ...
中国海上风电支撑结构一体化设计综述
1
2023
... 若要比较全面地进行低电压穿越过程中风电机组特性与载荷仿真,就需要对风电机组整机进行建模,包括风轮、塔架、传动系统、电机以及控制模型.当前,应用较多的风电机组整机仿真软件有Bladed、FAST和HAWC2等[16],这些软件的优势在于功率预测、载荷分析,缺少精细化的电机和变流器模型,因此难以准确模拟并网特性.部分学者采用将外部程序与这些整机仿真软件联合仿真的方法,扩展了考虑电网故障穿越的仿真功能.文献[17]采用MATLAB/Simulink建立电机模型,采用FAST建立机组的气动与机械模型,通过联合仿真研究发现,风电机组低电压穿越过程中电磁扭矩突变会对塔架及传动部件产生较大的影响.文献[18]采用Simulink建立简化的电网模型,通过与Bladed中的机组模型进行联合仿真,研究了风电机组在低电压穿越故障时塔筒的机械载荷,结果发现,当风电机组因不具备低电压穿越能力而脱网时,塔底的机械载荷可能达到正常发电情况下的2~3倍.文献[19]在Bladed中采用柔性轴模型,在Simulink中建立电磁暂态仿真模型,分析了低电压穿越故障对机组传动链的影响,结果发现,双馈发电机电磁力矩的突变将激发传动轴转速振荡和扭振.应有等[20]开展了类似的研究,结果发现,双馈风电机组在电网对称和不对称跌落故障穿越过程中,都会导致传动链出现扭振,从而显著增加传动链轴系、塔架左右方向的载荷. ...
Summary of offshore wind support structure integrated design in China
1
2023
... 若要比较全面地进行低电压穿越过程中风电机组特性与载荷仿真,就需要对风电机组整机进行建模,包括风轮、塔架、传动系统、电机以及控制模型.当前,应用较多的风电机组整机仿真软件有Bladed、FAST和HAWC2等[16],这些软件的优势在于功率预测、载荷分析,缺少精细化的电机和变流器模型,因此难以准确模拟并网特性.部分学者采用将外部程序与这些整机仿真软件联合仿真的方法,扩展了考虑电网故障穿越的仿真功能.文献[17]采用MATLAB/Simulink建立电机模型,采用FAST建立机组的气动与机械模型,通过联合仿真研究发现,风电机组低电压穿越过程中电磁扭矩突变会对塔架及传动部件产生较大的影响.文献[18]采用Simulink建立简化的电网模型,通过与Bladed中的机组模型进行联合仿真,研究了风电机组在低电压穿越故障时塔筒的机械载荷,结果发现,当风电机组因不具备低电压穿越能力而脱网时,塔底的机械载荷可能达到正常发电情况下的2~3倍.文献[19]在Bladed中采用柔性轴模型,在Simulink中建立电磁暂态仿真模型,分析了低电压穿越故障对机组传动链的影响,结果发现,双馈发电机电磁力矩的突变将激发传动轴转速振荡和扭振.应有等[20]开展了类似的研究,结果发现,双馈风电机组在电网对称和不对称跌落故障穿越过程中,都会导致传动链出现扭振,从而显著增加传动链轴系、塔架左右方向的载荷. ...
A new control strategy to suppress the tower vibrations of variable speed wind turbines
1
2014
... 若要比较全面地进行低电压穿越过程中风电机组特性与载荷仿真,就需要对风电机组整机进行建模,包括风轮、塔架、传动系统、电机以及控制模型.当前,应用较多的风电机组整机仿真软件有Bladed、FAST和HAWC2等[16],这些软件的优势在于功率预测、载荷分析,缺少精细化的电机和变流器模型,因此难以准确模拟并网特性.部分学者采用将外部程序与这些整机仿真软件联合仿真的方法,扩展了考虑电网故障穿越的仿真功能.文献[17]采用MATLAB/Simulink建立电机模型,采用FAST建立机组的气动与机械模型,通过联合仿真研究发现,风电机组低电压穿越过程中电磁扭矩突变会对塔架及传动部件产生较大的影响.文献[18]采用Simulink建立简化的电网模型,通过与Bladed中的机组模型进行联合仿真,研究了风电机组在低电压穿越故障时塔筒的机械载荷,结果发现,当风电机组因不具备低电压穿越能力而脱网时,塔底的机械载荷可能达到正常发电情况下的2~3倍.文献[19]在Bladed中采用柔性轴模型,在Simulink中建立电磁暂态仿真模型,分析了低电压穿越故障对机组传动链的影响,结果发现,双馈发电机电磁力矩的突变将激发传动轴转速振荡和扭振.应有等[20]开展了类似的研究,结果发现,双馈风电机组在电网对称和不对称跌落故障穿越过程中,都会导致传动链出现扭振,从而显著增加传动链轴系、塔架左右方向的载荷. ...
风电机组低电压穿越过程机械载荷特性研究
1
2016
... 若要比较全面地进行低电压穿越过程中风电机组特性与载荷仿真,就需要对风电机组整机进行建模,包括风轮、塔架、传动系统、电机以及控制模型.当前,应用较多的风电机组整机仿真软件有Bladed、FAST和HAWC2等[16],这些软件的优势在于功率预测、载荷分析,缺少精细化的电机和变流器模型,因此难以准确模拟并网特性.部分学者采用将外部程序与这些整机仿真软件联合仿真的方法,扩展了考虑电网故障穿越的仿真功能.文献[17]采用MATLAB/Simulink建立电机模型,采用FAST建立机组的气动与机械模型,通过联合仿真研究发现,风电机组低电压穿越过程中电磁扭矩突变会对塔架及传动部件产生较大的影响.文献[18]采用Simulink建立简化的电网模型,通过与Bladed中的机组模型进行联合仿真,研究了风电机组在低电压穿越故障时塔筒的机械载荷,结果发现,当风电机组因不具备低电压穿越能力而脱网时,塔底的机械载荷可能达到正常发电情况下的2~3倍.文献[19]在Bladed中采用柔性轴模型,在Simulink中建立电磁暂态仿真模型,分析了低电压穿越故障对机组传动链的影响,结果发现,双馈发电机电磁力矩的突变将激发传动轴转速振荡和扭振.应有等[20]开展了类似的研究,结果发现,双馈风电机组在电网对称和不对称跌落故障穿越过程中,都会导致传动链出现扭振,从而显著增加传动链轴系、塔架左右方向的载荷. ...
Wind turbine mechanical load characteristics research during LVRT
1
2016
... 若要比较全面地进行低电压穿越过程中风电机组特性与载荷仿真,就需要对风电机组整机进行建模,包括风轮、塔架、传动系统、电机以及控制模型.当前,应用较多的风电机组整机仿真软件有Bladed、FAST和HAWC2等[16],这些软件的优势在于功率预测、载荷分析,缺少精细化的电机和变流器模型,因此难以准确模拟并网特性.部分学者采用将外部程序与这些整机仿真软件联合仿真的方法,扩展了考虑电网故障穿越的仿真功能.文献[17]采用MATLAB/Simulink建立电机模型,采用FAST建立机组的气动与机械模型,通过联合仿真研究发现,风电机组低电压穿越过程中电磁扭矩突变会对塔架及传动部件产生较大的影响.文献[18]采用Simulink建立简化的电网模型,通过与Bladed中的机组模型进行联合仿真,研究了风电机组在低电压穿越故障时塔筒的机械载荷,结果发现,当风电机组因不具备低电压穿越能力而脱网时,塔底的机械载荷可能达到正常发电情况下的2~3倍.文献[19]在Bladed中采用柔性轴模型,在Simulink中建立电磁暂态仿真模型,分析了低电压穿越故障对机组传动链的影响,结果发现,双馈发电机电磁力矩的突变将激发传动轴转速振荡和扭振.应有等[20]开展了类似的研究,结果发现,双馈风电机组在电网对称和不对称跌落故障穿越过程中,都会导致传动链出现扭振,从而显著增加传动链轴系、塔架左右方向的载荷. ...
基于联合仿真的风电机组低电压穿越传动链扭振抑制研究
1
2016
... 若要比较全面地进行低电压穿越过程中风电机组特性与载荷仿真,就需要对风电机组整机进行建模,包括风轮、塔架、传动系统、电机以及控制模型.当前,应用较多的风电机组整机仿真软件有Bladed、FAST和HAWC2等[16],这些软件的优势在于功率预测、载荷分析,缺少精细化的电机和变流器模型,因此难以准确模拟并网特性.部分学者采用将外部程序与这些整机仿真软件联合仿真的方法,扩展了考虑电网故障穿越的仿真功能.文献[17]采用MATLAB/Simulink建立电机模型,采用FAST建立机组的气动与机械模型,通过联合仿真研究发现,风电机组低电压穿越过程中电磁扭矩突变会对塔架及传动部件产生较大的影响.文献[18]采用Simulink建立简化的电网模型,通过与Bladed中的机组模型进行联合仿真,研究了风电机组在低电压穿越故障时塔筒的机械载荷,结果发现,当风电机组因不具备低电压穿越能力而脱网时,塔底的机械载荷可能达到正常发电情况下的2~3倍.文献[19]在Bladed中采用柔性轴模型,在Simulink中建立电磁暂态仿真模型,分析了低电压穿越故障对机组传动链的影响,结果发现,双馈发电机电磁力矩的突变将激发传动轴转速振荡和扭振.应有等[20]开展了类似的研究,结果发现,双馈风电机组在电网对称和不对称跌落故障穿越过程中,都会导致传动链出现扭振,从而显著增加传动链轴系、塔架左右方向的载荷. ...
Study on suppression strategy for wind turbine drive train torsional vibration under grid fault based on co-simulation
1
2016
... 若要比较全面地进行低电压穿越过程中风电机组特性与载荷仿真,就需要对风电机组整机进行建模,包括风轮、塔架、传动系统、电机以及控制模型.当前,应用较多的风电机组整机仿真软件有Bladed、FAST和HAWC2等[16],这些软件的优势在于功率预测、载荷分析,缺少精细化的电机和变流器模型,因此难以准确模拟并网特性.部分学者采用将外部程序与这些整机仿真软件联合仿真的方法,扩展了考虑电网故障穿越的仿真功能.文献[17]采用MATLAB/Simulink建立电机模型,采用FAST建立机组的气动与机械模型,通过联合仿真研究发现,风电机组低电压穿越过程中电磁扭矩突变会对塔架及传动部件产生较大的影响.文献[18]采用Simulink建立简化的电网模型,通过与Bladed中的机组模型进行联合仿真,研究了风电机组在低电压穿越故障时塔筒的机械载荷,结果发现,当风电机组因不具备低电压穿越能力而脱网时,塔底的机械载荷可能达到正常发电情况下的2~3倍.文献[19]在Bladed中采用柔性轴模型,在Simulink中建立电磁暂态仿真模型,分析了低电压穿越故障对机组传动链的影响,结果发现,双馈发电机电磁力矩的突变将激发传动轴转速振荡和扭振.应有等[20]开展了类似的研究,结果发现,双馈风电机组在电网对称和不对称跌落故障穿越过程中,都会导致传动链出现扭振,从而显著增加传动链轴系、塔架左右方向的载荷. ...
大型双馈风电机组电网故障穿越过程载荷特性分析
1
2020
... 若要比较全面地进行低电压穿越过程中风电机组特性与载荷仿真,就需要对风电机组整机进行建模,包括风轮、塔架、传动系统、电机以及控制模型.当前,应用较多的风电机组整机仿真软件有Bladed、FAST和HAWC2等[16],这些软件的优势在于功率预测、载荷分析,缺少精细化的电机和变流器模型,因此难以准确模拟并网特性.部分学者采用将外部程序与这些整机仿真软件联合仿真的方法,扩展了考虑电网故障穿越的仿真功能.文献[17]采用MATLAB/Simulink建立电机模型,采用FAST建立机组的气动与机械模型,通过联合仿真研究发现,风电机组低电压穿越过程中电磁扭矩突变会对塔架及传动部件产生较大的影响.文献[18]采用Simulink建立简化的电网模型,通过与Bladed中的机组模型进行联合仿真,研究了风电机组在低电压穿越故障时塔筒的机械载荷,结果发现,当风电机组因不具备低电压穿越能力而脱网时,塔底的机械载荷可能达到正常发电情况下的2~3倍.文献[19]在Bladed中采用柔性轴模型,在Simulink中建立电磁暂态仿真模型,分析了低电压穿越故障对机组传动链的影响,结果发现,双馈发电机电磁力矩的突变将激发传动轴转速振荡和扭振.应有等[20]开展了类似的研究,结果发现,双馈风电机组在电网对称和不对称跌落故障穿越过程中,都会导致传动链出现扭振,从而显著增加传动链轴系、塔架左右方向的载荷. ...
Load characteristic analysis of grid fault ride-through process for DFIG based large wind turbine
1
2020
... 若要比较全面地进行低电压穿越过程中风电机组特性与载荷仿真,就需要对风电机组整机进行建模,包括风轮、塔架、传动系统、电机以及控制模型.当前,应用较多的风电机组整机仿真软件有Bladed、FAST和HAWC2等[16],这些软件的优势在于功率预测、载荷分析,缺少精细化的电机和变流器模型,因此难以准确模拟并网特性.部分学者采用将外部程序与这些整机仿真软件联合仿真的方法,扩展了考虑电网故障穿越的仿真功能.文献[17]采用MATLAB/Simulink建立电机模型,采用FAST建立机组的气动与机械模型,通过联合仿真研究发现,风电机组低电压穿越过程中电磁扭矩突变会对塔架及传动部件产生较大的影响.文献[18]采用Simulink建立简化的电网模型,通过与Bladed中的机组模型进行联合仿真,研究了风电机组在低电压穿越故障时塔筒的机械载荷,结果发现,当风电机组因不具备低电压穿越能力而脱网时,塔底的机械载荷可能达到正常发电情况下的2~3倍.文献[19]在Bladed中采用柔性轴模型,在Simulink中建立电磁暂态仿真模型,分析了低电压穿越故障对机组传动链的影响,结果发现,双馈发电机电磁力矩的突变将激发传动轴转速振荡和扭振.应有等[20]开展了类似的研究,结果发现,双馈风电机组在电网对称和不对称跌落故障穿越过程中,都会导致传动链出现扭振,从而显著增加传动链轴系、塔架左右方向的载荷. ...
基于GH Bladed和MATLAB的交互软件及风机的变桨控制研究
1
2011
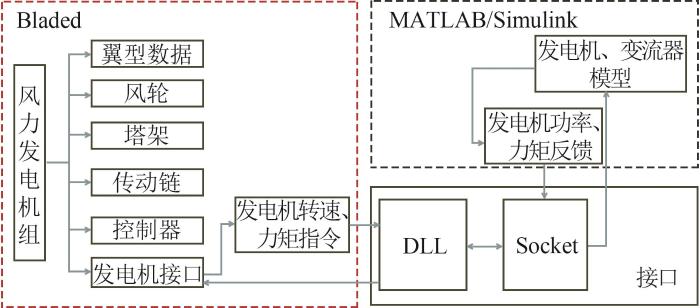
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
Research on interactive software and variable pitch control of fan based on GH Bladed and MATLAB
1
2011
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
基于Bladed和MATLAB的风机联合建模与仿真
1
2013
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
Joint modeling and simulation analysis of wind turbine based on MATLAB and bladed
1
2013
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
GH Bladed和Matlab的交互软件设计及风力发电机的独立变桨控制器仿真研究
1
2013
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
Interactive software platform design based on GH bladed and Matlab with simulation study of individual pitch controller of wind turbine
1
2013
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
基于Bladed与Matlab的风力发电机组控制器设计
1
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
Design of wind turbine controller based on bladed and Matlab
1
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
基于免疫遗传算法的风力发电机组变增益PI控制器参数整定与优化
1
2016
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
Parameters tuning and optimization for variable-gain PI controller of wind turbine based on immune genetic algorithm
1
2016
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
双馈风电机组电能质量特性联合仿真建模分析
1
2021
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
United simulation analysis of power quality characteristics of DFIG wind turbines
1
2021
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
基于TCP的Socket多线程通信
1
2009
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
The multi-thread communication of Socket based on TCP
1
2009
... MATLAB软件的数据交互有命名管道(Named Pipe)、Engine技术以及M文件等方式,这些方式在联合仿真中均有应用.敬维[21]采用MATLAB的Engine技术进行Bladed和MATLAB的通信,研究了独立变桨的PI控制器.刘国祥等[22]采用Bladed计算翼型气动数据,然后在MATLAB采用BEM计算风轮气动载荷,数据传递采用M文件交互方式.文献[23-24]也采用类似的建模与通信方法研究机组控制策略.高峰等[25]基于命名管道技术实现了MATLAB与Bladed的数据交互,研究了风电机组独立变桨控制器.杨靖等[26]利用MATLAB中的S函数,建立了Bladed与MATLAB联合仿真平台,研究了风电机组的闪变外特性和功率控制特性.以上数据交互方式适合与外部程序进行交互,可以满足联合仿真的需求.除了采用外部程序模拟电机和控制器以外,还可能使用外部的控制器与电机的半物理模型.因此,本文采用基于TCP通信协议的Socket通信,可以同时满足数值仿真和半物理仿真的需求.Socket通常也称为套接字,用于描述IP地址和端口,在不同主机上建立服务端与客户端,通过端口传输数据,可以实现不同主机上应用之间的双向通信[27]. ...
1
2019
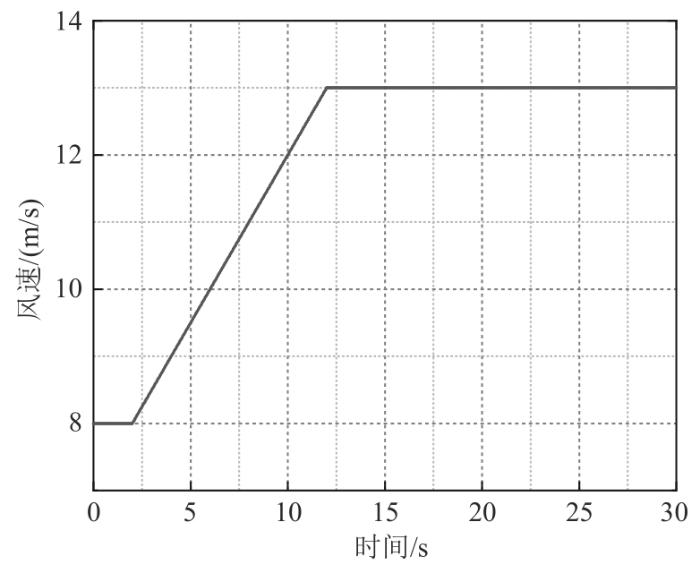
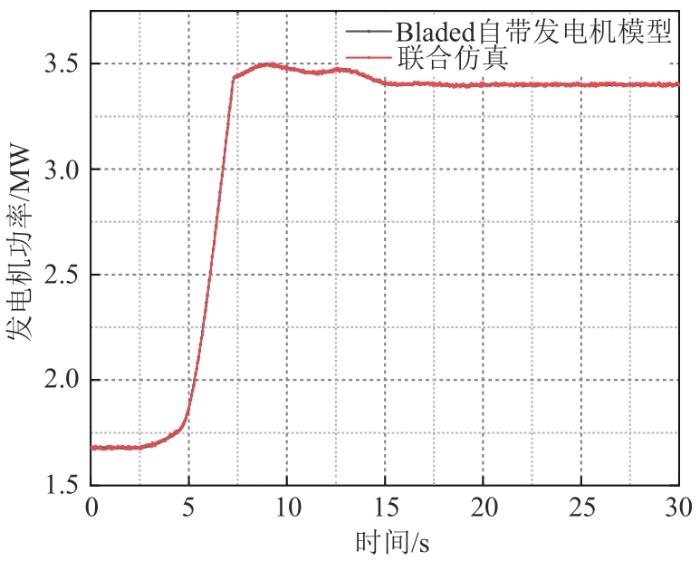
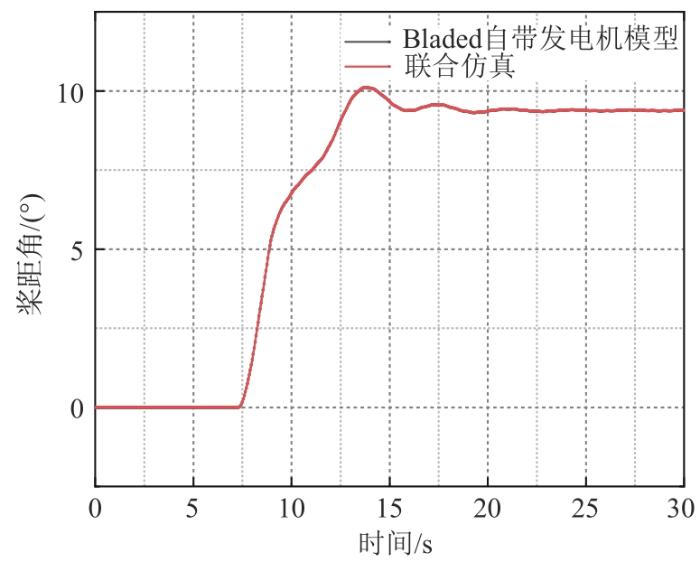
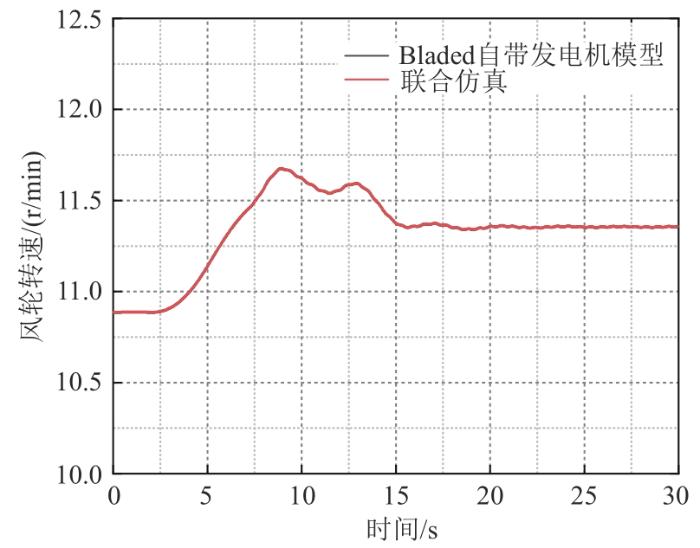
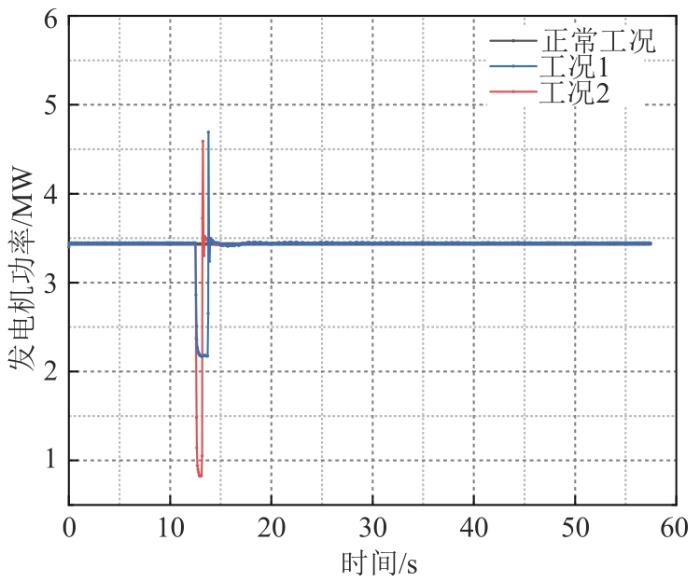
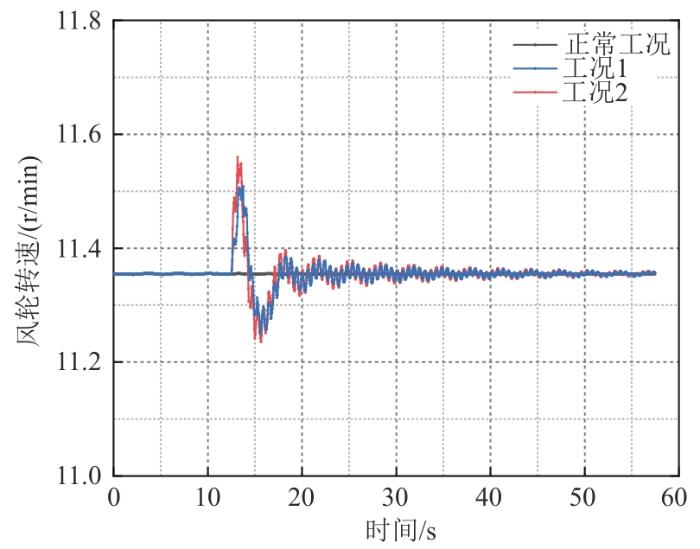
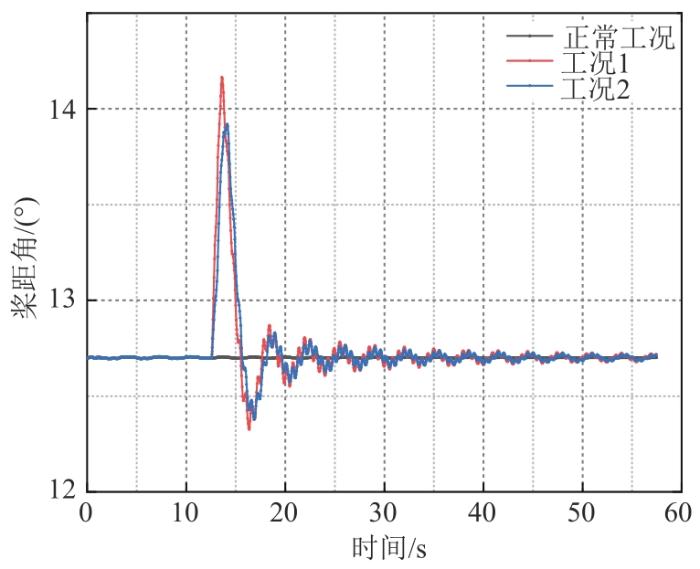
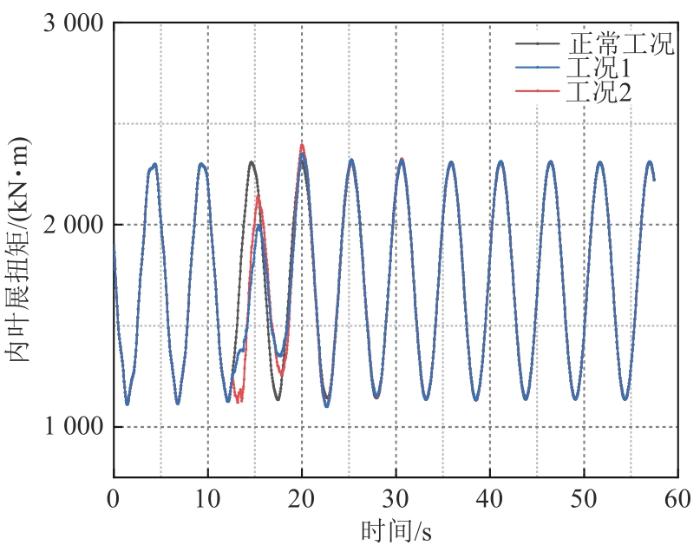
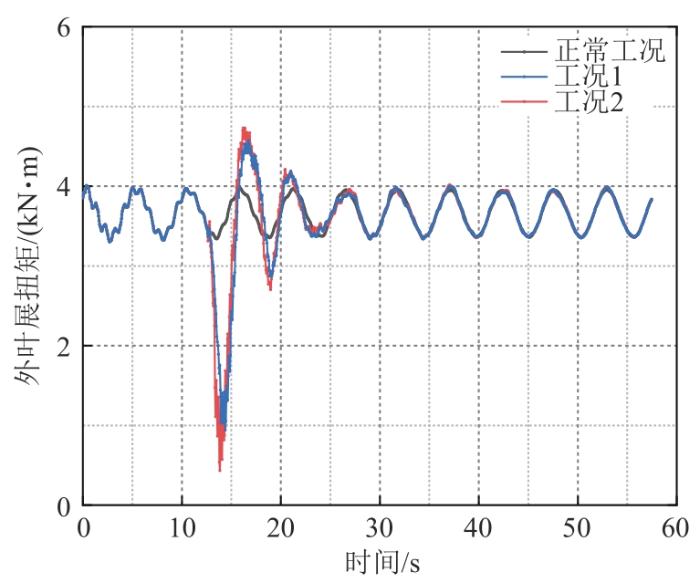
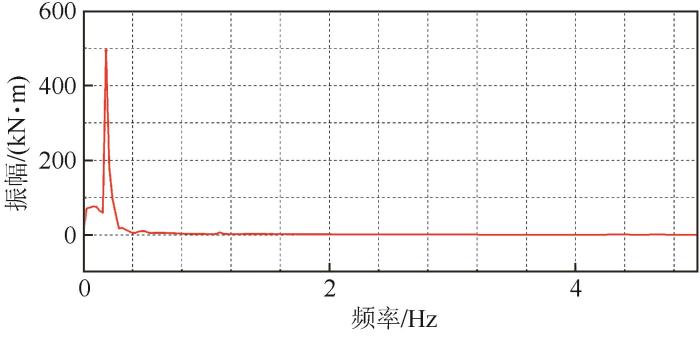
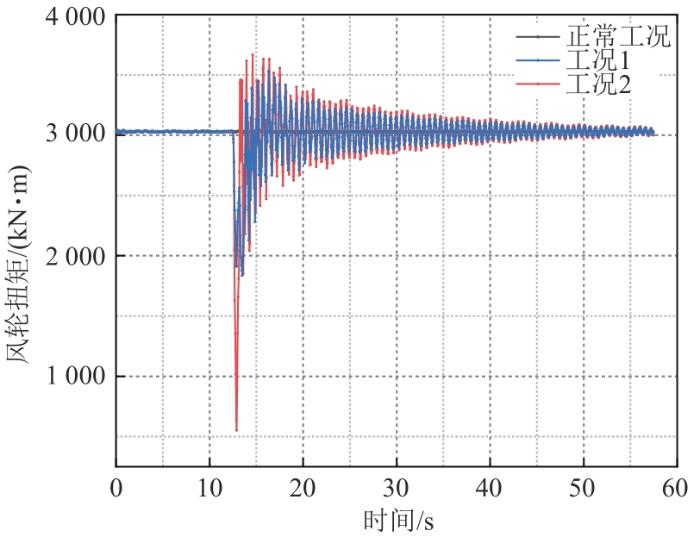
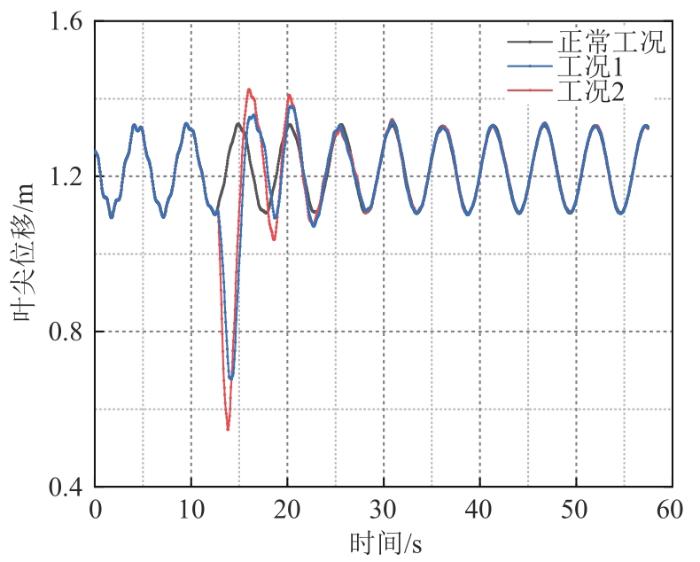
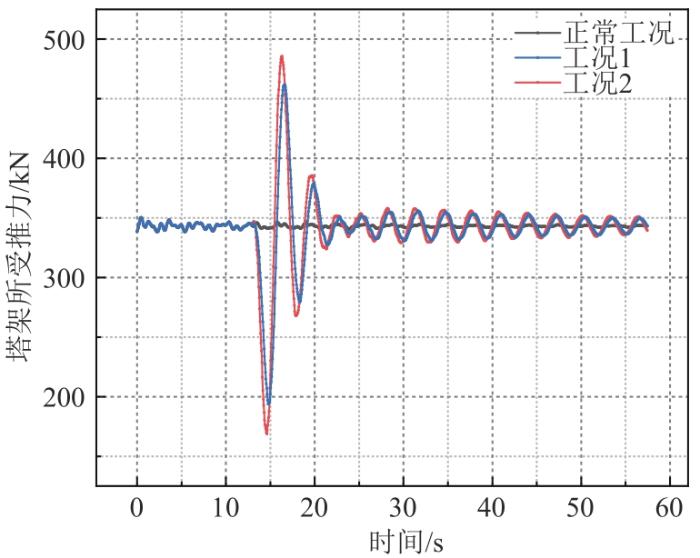
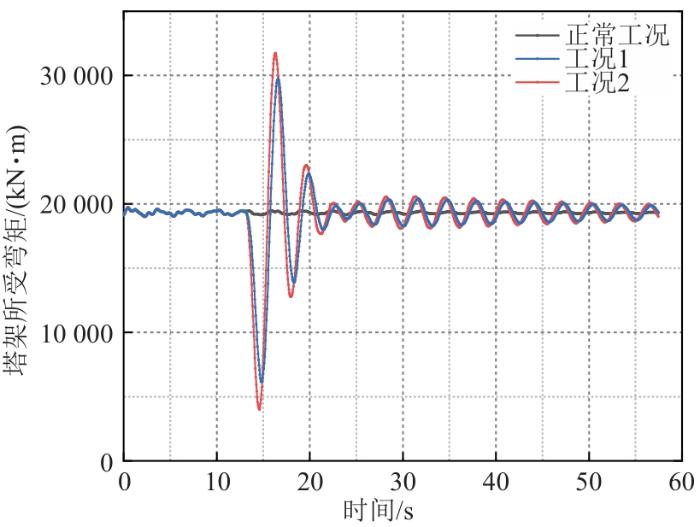
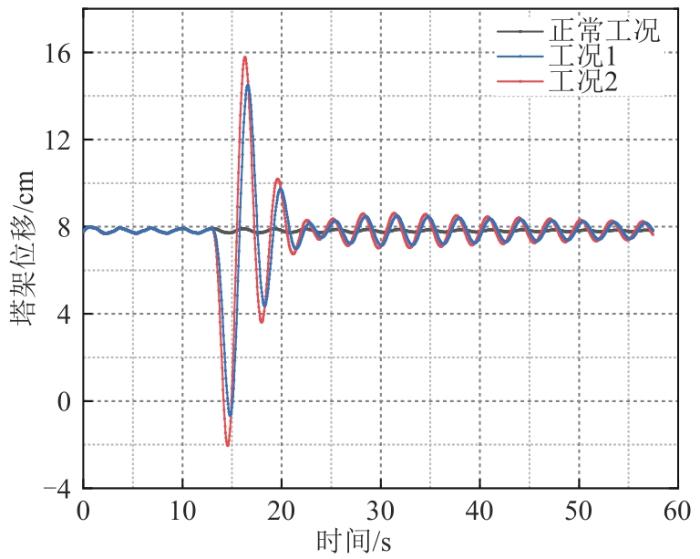
... 采用联合仿真平台模拟该3.4 MW风电机组在低电压穿越过程中的暂态特性响应.仿真工况如下:风轮轮毂风速为15 m/s且恒定,此时机组的功率和转速均为额定值,对应的桨矩角为12.71°.按照国标GB∕T 36995—2018[28],分别计算2种电网电压跌落工况:工况1,假设t =12.5 s时三相电压对称跌落至50%,即跌落50%,经过1.214 s后恢复正常;工况2,假设t =12.5 s时三相电压对称跌落至20%,即跌落80%,并持续625 ms. ...
1
2019
... 采用联合仿真平台模拟该3.4 MW风电机组在低电压穿越过程中的暂态特性响应.仿真工况如下:风轮轮毂风速为15 m/s且恒定,此时机组的功率和转速均为额定值,对应的桨矩角为12.71°.按照国标GB∕T 36995—2018[28],分别计算2种电网电压跌落工况:工况1,假设t =12.5 s时三相电压对称跌落至50%,即跌落50%,经过1.214 s后恢复正常;工况2,假设t =12.5 s时三相电压对称跌落至20%,即跌落80%,并持续625 ms. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}