0 引言
以燃气轮机为代表的叶轮机械是能源动力领域的重要设备,是大电网发电和调峰的最佳选择,在国家能源安全中扮演着无可替代的角色,是关系到国民经济发展的高端核心装备[1 -7 ] 。叶片是叶轮机械的关键零件,是实现工质能量转换的重要载体,其造型质量直接影响叶轮机械工作效率和性能。叶片加工过程复杂,精度要求高,必须通过精确的测量手段进行误差评定,以保证叶片制造质量[8 -9 ] 。另外,叶片制造通常采用批量生产,且种类繁多,需要快捷高效的检测方式。
当前国内常用的测量方法分为接触式和非接触式。其中,接触式测量包括标准样板测量、电感量仪测量、三坐标测量机测量,非接触式测量包括激光测量和机器视觉测量。标准样板法[10 ] 操作简单、成本低,适用于生产现场,但是测量精度和自动化程度低,需要大量的标准样板进行匹配。电感量仪[10 ] 采用传感器感应截面坐标信息,测量精度较高,环境要求低,但是成本高、通用性差,需要利用标准叶片对仪器进行校准。三坐标测量机[10 -12 ] 选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所。以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点。激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法。
本文提出的基于图像的叶型几何参数测量方法以计算机视觉为基础[15 ] ,操作简单且测量精度较高,可广泛应用于叶片检测中。
1 基于图像的叶型参数测量方法
1.1 基于图像的叶型参数测量方法步骤
基于图像的叶型参数测量方法由图像获取、图像预处理、叶型参数初步识别及准确获取4个步骤组成,如图1 所示。
图1
图1
基于图像的叶型参数测量方法步骤
Fig. 1
Steps of the proposed image-based blade parameter inspection method
1.2 叶型图像获取
叶型图像的获取需要综合考虑测量精度和运算效率的要求。假设叶型参数的测量精度要求为λ u × v p i d σ d
σ = d / m i n ( u , v ) (1)
若σ ≤ λ σ > λ
1.3 叶型图像预处理
为了获取高质量的叶型图像,在进行参数测量之前需对图像进行预处理,具体包括噪声处理和特征增强,以分辨率u × v f 0 ( i , j ) i , j ) f 0 i j [16 -17 ] G ( i , j ) f G ( i , j ) 式(2)对边缘进行增强,以获得准确、清晰的叶型图像f ( i , j ) [13 ] 。
f ( i , j ) = a f G ( i , j ) + b (2)
式中a b a = 1.2 ,b = 30 。
1.4 叶型参数测量
1.4.1 叶型轮廓提取
叶型轮廓的准确提取是叶型参数精确测量的重要保证。本文首先采用Canny算子[18 ] 对叶片图像内的边缘信息进行提取。通过应用形态学图像处理方法[19 ] 的腐蚀和膨胀操作,对边缘提取后的孔洞进行填充[20 -22 ] ,以获得叶片图像中所有的边缘信息。之后,采用最大外缘轮廓法[23 -24 ] 对已提取出的所有边缘信息进行筛选,最终获得叶片外形轮廓信息,记为f c f c ∈ R m × 2 m
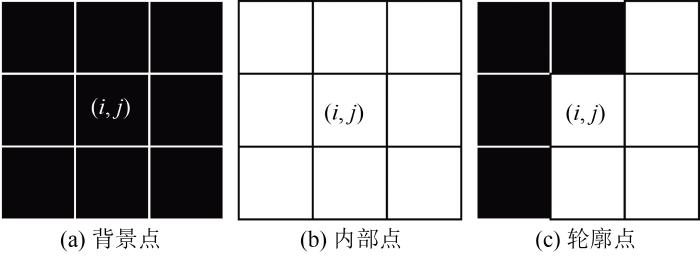
本文采用的最大外缘轮廓法的具体实施方法为:假设经过形态学图像处理后的叶片图像为f ( i , j ) f ( i , j ) 图2 所示的3×3窗口对f ( i , j ) ( i , j ) N 8 ( i , j )
图2
图2
背景点、内部点和轮廓点定义
Fig. 2
Definitions of background point, internal point and contour point
若像素点( i , j ) N 8 ( i , j ) ( i , j ) 图2 (a)所示。反之,则判断像素点( i , j ) 图2 (b)所示。若像素点( i , j ) N 8 ( i , j ) ( i , j ) 图2 (c)所示。
1.4.2 测量参照物选择
以10 mm×10 mm大小的正方形作为尺寸参考,通过正方形在图像中所占的像素数,计算出单位像素的长度,从而推算出叶型关键参数。
1.4.3 叶型参数定义
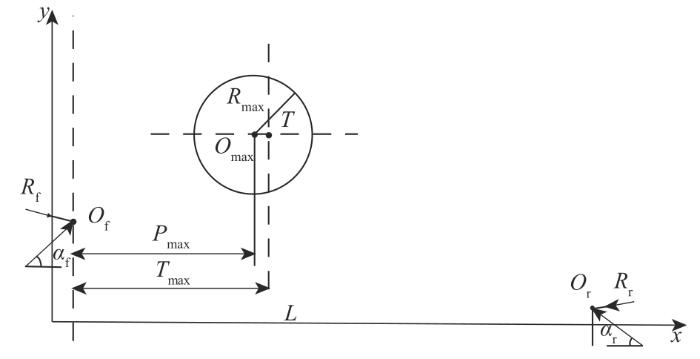
叶型参数[25 ] 如图3 所示,定义轴线方向为x 轴,额线方向为y 轴。图3 中,O f ( O f , x , O f , y ) O r ( O r , x , O r , y ) R f R r L x 轴向距离。叶片中弧线记为O f O r ̑ α f α r x 轴的夹角,记为几何入口角和几何出口角;O m a x R m a x P m a x O f O m a x x 轴向距离;T y 值点位置;T m a x T x 轴向距离。
图3
图3
叶片叶型参数
Fig. 3
Feature parameters of the blade
1.4.4 叶型参数初步识别
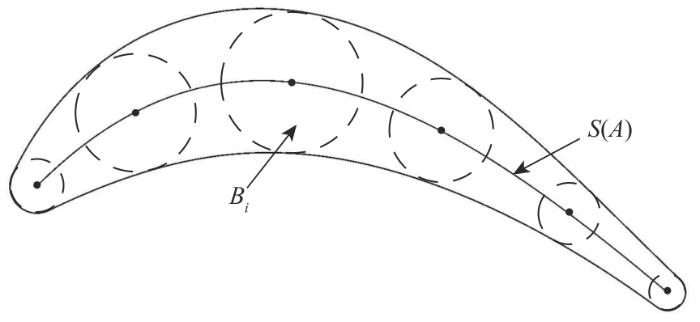
叶型参数测量的第一步是采用骨架提取的方法确定叶片的中弧线C ( x ) = O f O r ̑ S ( A ) C ( x ) B i 图4 所示。
图4
图4
叶片骨架提取
Fig. 4
Skeleton extraction for a blade image
S k ( A ) = ( A ⊖ k B i ) - ( A ⊖ k B i ) ∘ B i (3)
式中:k ⊖ ∘ K
K = m a x { k ( A ⊖ k B i ) ≠ ∅ } (4)
S ( A ) = ∪ k = 0 K S k ( A ) (5)
S ( A ) O f O r L 式(6)计算得到:
L = O r , x - O f , x (6)
式中O f , x O r , x x 轴坐标。
采用三次曲线对S ( A )
C ( x ) = a 0 x 3 + a 1 x 2 + a 2 x + a 1 (7)
式中:x ∈ [ 0 , L ] a 0 , a 1 a 2 式(7)求解需满足以下约束条件:
C ( 0 ) = 0 C ' ( 0 ) = t a n ( α f ) C ' ( T ) = 0 C ' ( L ) = - t a n ( α r ) (8)
α f = d C d x x = O f , x α r = d C d x x = O r , x (9)
a 0 = [ L t a n α f - P m a x ( t a n α f + t a n α r ) ] 3 L P m a x ( L - P m a x ) a 1 = [ - L 2 t a n α f + P m a x 2 ( t a n α f + t a n α r ) ] 2 L P m a x ( L - P m a x ) a 2 = t a n α f a 3 = 0 (10)
中弧线极大值点位置T d C d x = 0 O f T T m a x 式(11)计算获得
T m a x = T x - O f , x (11)
R ( x ) = b 0 x 3 + b 1 x 2 + b 2 x + b 3 (12)
式中b 0 , b 1 b 2 b 3 R ( x )
R ( 0 ) = R f R ( L ) = R r R ( P m a x ) = R m a x R ' ( P m a x ) = 0 (13)
令f c , k ∈ f c k ∈ m ],(x k , y k ) 为f c k R f R r R m a x [26 ] 为
R f = m i n k ∈ [ 1 , m ] [ ( O f , x - x k ) 2 + ( O f , y - y k ) 2 ] R r = m i n k ∈ [ 1 , m ] [ ( O r , x - x k ) 2 + ( O r , y - y k ) 2 ] R m a x = m a x i ∈ [ 1 , n ] { m i n k ∈ [ 1 , m ] [ ( S i , x - x k ) ] 2 + ( S i , y - y k ) ] 2 } (14)
b 0 = - L 2 ( R f - R m a x ) - 2 L T m a x ( R f - R m a x ) + T m a x 2 ( R f - R r ) L T m a x 2 ( L 2 - 2 L T m a x + T m a x 2 ) b 1 = L 3 ( R f - P m a x ) - 3 L T m a x 2 ( R f - P m a x ) + 2 T m a x 3 ( R f - R r ) L T m a x 2 L 2 - 2 L T m a x + T m a x 2 b 2 = - 2 L 3 ( R f - P m a x ) - 3 L 2 T m a x ( R f - P m a x ) + T m a x 3 ( R f - R r ) L T m a x 2 ( L 2 - 2 L T m a x + T m a x 2 ) b 3 = R f (15)
O m a x = [ ( S i , x , S i , y ) R m a x ] (16)
P m a x = O m a x , x - O f , x (17)
1.5 叶型参数准确获取
叶型中弧线C x 轴向间距L O m a x R m a x O f O r R f R r α f α r H ( i , j ) P P
P = ( L , R f , R r , R m a x , P m a x , T m a x , α f , α r ) T (18)
叶型参数准确获取的目的是寻找一组参数P P H f c
m i n ∑ i = 1 u ∑ j = 1 v [ f c ( i , j ) - H ( i , j ) ] s . t . L ≤ m a x ( f c , x ) (19)
式中初始叶型H 0 P 0 [27 ] 迭代求解。
2 测试验证
2.1 测试环境介绍
以上基于图像的叶型参数测量方法采用Python 3.85在Pycharm Community 2021.1中编译,并开发了基于图像的参数测量软件(登记号2020SR1770966),集成叶片图像预处理,叶型参数测量和参数检测功能。软件界面如图4 所示。
对该软件进行叶型参数测试应用。通过相机采集到的图像分辨率为4 032×3 024,相机水平置于固定支架上,如图5 所示,相机距离被测物的高度为380 mm。
图 5
图 5
图像采集环境
Fig. 5
Experimental setting for image acquisition
图4
图4
基于图像的叶片叶型关键参数测量软件界面
Fig. 4
Software interface of the proposed image-based blade feature parameter inspection method
以某型透平叶片的打印图为测量对象,其主要几何参数如表1 所示。在被测对象上侧放置10 mm×10 mm正方形块为尺寸参照物。
2.2 叶型图像预处理
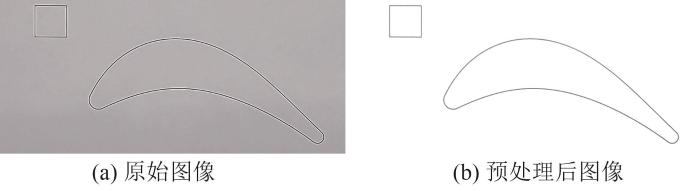
采用图像预处理程序对目标区域进行截取,截取后图像分辨率为1 056×780。采用大小为5×5,标准差为0的高斯滤波器对图像进行处理。经过图像预处理后的结果如图6 (b)所示。
图6
图6
叶型图像预处理
Fig. 6
Preprocessing for the turbine blade image
2.3 叶型参数初步识别
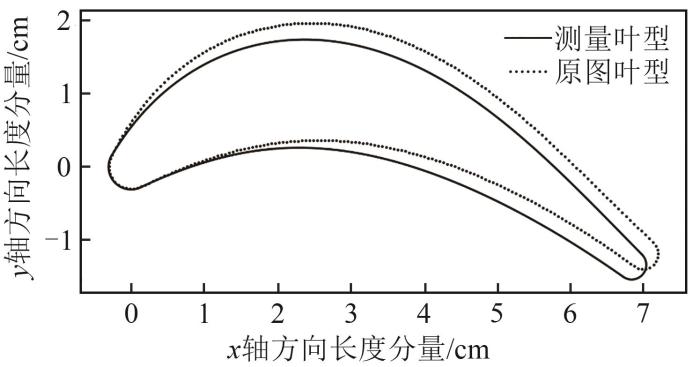
以前缘圆心O f 表2 给出采用1.3.4所述方法提取的叶型关键参数。可见,初步测量的最大误差分别为前后缘圆心间x 轴距离L P m a x α r 图7 所示),重建叶型有较大误差,需要对测量值进行精确求解。
图7
图7
基于测量值重建叶型与原图叶型对比
Fig. 7
Comparison between the original and the turbine blade reconstruction using inspected feature parameters
2.4 叶型参数准确获取
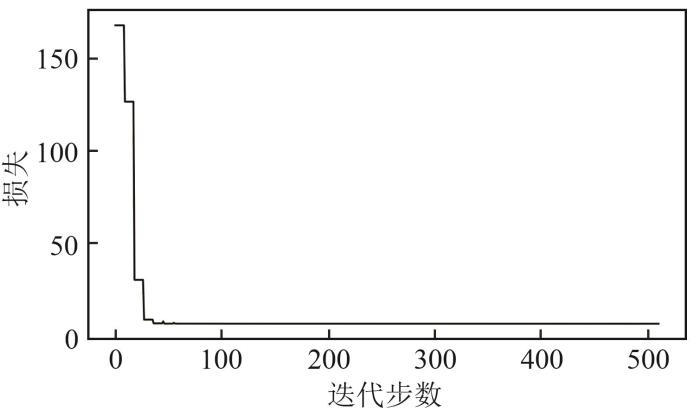
采用LM算法对测量值进行优化,最大迭代数和残差分别设定为n ≥1 400和ε ≤e-6 。优化过程中的残差曲线如图8 所示,优化结果如表3 所示。
图8
图8
参数优化过程收敛性
Fig. 8
Convergence of the feature parameter optimization
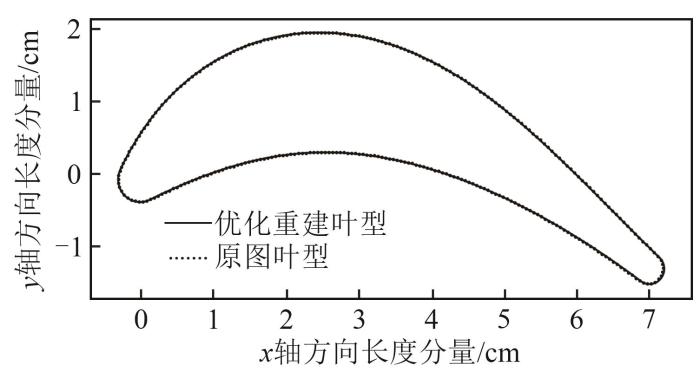
优化后,测量参数最大误差为δ ( P m a x ) =0.19 mm,最大角度误差为δ ( α r ) 图9 对比了根据最终测量结果重建的叶型与原始叶型,二者吻合效果良好。由于测量精度与图像分辨率有直接关系,通过增大图像分辨率,将进一步提高叶型参数测量精度。
图9
图9
基于优化值重建叶型与原图叶型对比
Fig. 9
Comparison between the original and the turbine blade reconstruction using optimized feature parameters
3 结论
提出了一种基于图像的透平叶片叶型关键参数优化测量方法。该方法可实现透平叶片叶型关键参数的非接触式测量。实验表明,该方法具有较高的测量精度,测量绝对误差不大于±0.2 mm,相对误差不大于1.5%。开发的软件及测量方法具有自动化、流程化和智能化的特点,可应用于工业叶片的批量生产和检测。
参考文献
View Option
[1]
[本文引用: 1]
XUE X D HAN W WANG X D et al Small and medium-scale power generation devices suiting for distributed combined cooling, heating and power system
[J].Power Generation Technology ,2020 ,41 (3 ):252 -260 . doi:10.12096/j.2096-4528.pgt.20031
[本文引用: 1]
[2]
BAI M L ZHANG D X LIU J F et al Anomaly detection of gas turbine hot components based on deep autoencoder and support vector data description
[J].Power Generation Technology ,2021 ,42 (4 ):422 -430 . doi:10.12096/j.2096-4528.pgt.21021
[3]
刘志坦 ,姚杰 ,庄柯 ,等 燃气轮机与燃煤机组SCR脱硝催化剂特性比较
[J].中国电力 ,2021 ,54 (6 ):145 -152 .
LIU Z T YAO J ZHUANG K et al Comparison of characteristics of SCR-DeNO x
[J].Electric Power ,2021 ,54 (6 ):145 -152 .
[4]
HE P GONG Z J JIN H R et al Review of peak-shaving problem of electric power system with high proportion of renewable energy
[J].Electric Power Construction ,2022 ,43 (11 ):108 -121 . doi:10.12204/j.issn.1000-7229.2022.11.011
[5]
张程 ,匡宇 ,刘佳静 ,等 考虑需求侧管理的风光燃储微网两阶段优化调度
[J].电力系统保护与控制 ,2022 ,50 (24 ):13 -22 .
ZHANG C KUANG Y LIU J J et al Two-stage optimal scheduling of a wind, photovoltaic, gas turbine, fuel cell and storage energy microgrid considering demand-side management
[J].Power System Protection and Control ,2022 ,50 (24 ):13 -22 .
[6]
娄清辉 ,高元 ,曹威 ,等 分布式能源系统微型燃气轮机气耗特性
[J].分布式能源 ,2023 ,8 (5 ):77 -82 .
LOU Q H GAO Y CAO W et al Gas consumption characteristics of micro gas turbines in distributed energy systems
[J].Distributed Energy ,2023 ,8 (5 ):77 -82 .
[7]
[本文引用: 1]
MA R YANG H LÜ Z H et al Research on the impact of gas status on small signal stability of power system for combined electricity and gas system
[J].Journal of Electric Power Science and Technology ,2021 ,36 (1 ):3 -12 . doi:10.19781/j.issn.1673-9140.2021.01.001
[本文引用: 1]
[10]
陈非凡 ,强锡富 汽轮机叶片叶型测量综述
[J].航空计测技术 ,1995 ,15 (3 ):3 -4 .
[本文引用: 3]
CHEN F F QIANG X F Overview on profile measurement of turbine blade
[J].Aviation Metrology & Measurement Technology ,1995 ,15 (3 ):3 -4 .
[本文引用: 3]
[11]
王军 航空发动机叶片三维轮廓测量方法研究
[D].北京 :中国科学院研究生院 ,2005 .
WANG J Study on measurement of 3D photography in aero engine vane
[D].Beijing :Chinese Academy of Sciences ,2005 .
[12]
[本文引用: 1]
LIN X J SHAN C W WANG Z Q et al Measurement techniques of coordinate measuring machine for blade surface of aero-engine
[J].Computer Integrated Manufacturing Systems .2012 ,18 (1 ):125 -131 . doi:10.1080/18756891.2015.1129592
[本文引用: 1]
[14]
[本文引用: 1]
PANG G X Research on on-line measurement technology of aero-engine blade based on binocular structure light
[D].Wuhan :Huazhong University of Science and Technology ,2020 . doi:10.1016/j.ast.2020.105951
[本文引用: 1]
[15]
[本文引用: 1]
KONG X L FU J L Computer-vision based on three-dimensional reconstruction technology and its applications in gas turbine industry
[J].Power Generation Technology ,2021 ,42 (4 ):454 -463 . doi:10.12096/j.2096-4528.pgt.21031
[本文引用: 1]
[18]
GONZALEZ R C WOODS R E Digital imaging processing [M].Beijing :Publishing House of Electronics Industry ,2011 .
[本文引用: 1]
[19]
张聪聪 ,牟莉 基于机器视觉的图像边缘检测算法研究
[J].国外电子测量技术 ,2020 ,39 (12 ):80 -85 .
[本文引用: 1]
ZHANG C C MOU L Research on image edge detection algorithm based on machine
[J].Foreign Electronic Measurement Technology ,2020 ,39 (12 ):80 -85 .
[本文引用: 1]
[21]
李建华 二维条码图像处理算法及其VLSI设计研究
[D].成都 :电子科技大学 ,2013 .
LI J H Research on two-dimensional barcode image processing algorithm and its VLSI design
[D].Chengdu :University of Electronic Science and Technology of China ,2013 .
[23]
SUZUKI S Topological structural analysis of digitized binary images by border following
[J].Computer Vision Graphics & Image Processing ,1985 ,30 (1 ):32 -46 . doi:10.1016/0734-189x(85)90016-7
[本文引用: 1]
[24]
SAEED K RYBNIK M TABEDZKI M Implementation and advanced results on the non-interrupted skeletonization algorithm
[C]//Computer Analysis of Images & Patterns ,International Conference.Caip Warsaw ,Poland :Springer-Verlag ,2001 :601 -609 . doi:10.1007/3-540-44692-3_72
[本文引用: 1]
[25]
朱林 ,王龙 一种透平钻具叶片叶型参数化设计方法
[J].机械研究与应用 ,2015 ,28 (4 ):174 -176 .
[本文引用: 1]
ZHU L WANG L A Method of parametric design for turbine drill blade profile
[J].Mechanical Research & Application ,2015 ,28 (4 ):174 -176 .
[本文引用: 1]
[26]
毛晨丽 航空发动机叶片截面特征参数检测
[D].天津 :天津大学 ,2016 .
[本文引用: 1]
MAO C L Inspection of aero engine blade cross-sectional feature parameters
[D].Tianjin :Tianjin University ,2016 .
[本文引用: 1]
[27]
[本文引用: 1]
[本文引用: 1]
适合分布式冷热电联供系统的中小型发电装置
1
2020
... 以燃气轮机为代表的叶轮机械是能源动力领域的重要设备,是大电网发电和调峰的最佳选择,在国家能源安全中扮演着无可替代的角色,是关系到国民经济发展的高端核心装备[1 -7 ] .叶片是叶轮机械的关键零件,是实现工质能量转换的重要载体,其造型质量直接影响叶轮机械工作效率和性能.叶片加工过程复杂,精度要求高,必须通过精确的测量手段进行误差评定,以保证叶片制造质量[8 -9 ] .另外,叶片制造通常采用批量生产,且种类繁多,需要快捷高效的检测方式. ...
Small and medium-scale power generation devices suiting for distributed combined cooling, heating and power system
1
2020
... 以燃气轮机为代表的叶轮机械是能源动力领域的重要设备,是大电网发电和调峰的最佳选择,在国家能源安全中扮演着无可替代的角色,是关系到国民经济发展的高端核心装备[1 -7 ] .叶片是叶轮机械的关键零件,是实现工质能量转换的重要载体,其造型质量直接影响叶轮机械工作效率和性能.叶片加工过程复杂,精度要求高,必须通过精确的测量手段进行误差评定,以保证叶片制造质量[8 -9 ] .另外,叶片制造通常采用批量生产,且种类繁多,需要快捷高效的检测方式. ...
基于深度自编码器和支持向量数据描述的燃气轮机高温部件异常检测
0
2021
Anomaly detection of gas turbine hot components based on deep autoencoder and support vector data description
0
2021
燃气轮机与燃煤机组SCR脱硝催化剂特性比较
0
2021
Comparison of characteristics of SCR-DeNO x
0
2021
高比例可再生能源电力系统调峰问题综述
0
2022
Review of peak-shaving problem of electric power system with high proportion of renewable energy
0
2022
考虑需求侧管理的风光燃储微网两阶段优化调度
0
2022
Two-stage optimal scheduling of a wind, photovoltaic, gas turbine, fuel cell and storage energy microgrid considering demand-side management
0
2022
Gas consumption characteristics of micro gas turbines in distributed energy systems
0
2023
电-气互联下燃气状态对电力系统小干扰稳定的影响
1
2021
... 以燃气轮机为代表的叶轮机械是能源动力领域的重要设备,是大电网发电和调峰的最佳选择,在国家能源安全中扮演着无可替代的角色,是关系到国民经济发展的高端核心装备[1 -7 ] .叶片是叶轮机械的关键零件,是实现工质能量转换的重要载体,其造型质量直接影响叶轮机械工作效率和性能.叶片加工过程复杂,精度要求高,必须通过精确的测量手段进行误差评定,以保证叶片制造质量[8 -9 ] .另外,叶片制造通常采用批量生产,且种类繁多,需要快捷高效的检测方式. ...
Research on the impact of gas status on small signal stability of power system for combined electricity and gas system
1
2021
... 以燃气轮机为代表的叶轮机械是能源动力领域的重要设备,是大电网发电和调峰的最佳选择,在国家能源安全中扮演着无可替代的角色,是关系到国民经济发展的高端核心装备[1 -7 ] .叶片是叶轮机械的关键零件,是实现工质能量转换的重要载体,其造型质量直接影响叶轮机械工作效率和性能.叶片加工过程复杂,精度要求高,必须通过精确的测量手段进行误差评定,以保证叶片制造质量[8 -9 ] .另外,叶片制造通常采用批量生产,且种类繁多,需要快捷高效的检测方式. ...
航空发动机叶片型面轮廓光学测量技术现状及发展趋势
1
2018
... 以燃气轮机为代表的叶轮机械是能源动力领域的重要设备,是大电网发电和调峰的最佳选择,在国家能源安全中扮演着无可替代的角色,是关系到国民经济发展的高端核心装备[1 -7 ] .叶片是叶轮机械的关键零件,是实现工质能量转换的重要载体,其造型质量直接影响叶轮机械工作效率和性能.叶片加工过程复杂,精度要求高,必须通过精确的测量手段进行误差评定,以保证叶片制造质量[8 -9 ] .另外,叶片制造通常采用批量生产,且种类繁多,需要快捷高效的检测方式. ...
Current technique and development trend of optical measurement of aero-engine blade profile
1
2018
... 以燃气轮机为代表的叶轮机械是能源动力领域的重要设备,是大电网发电和调峰的最佳选择,在国家能源安全中扮演着无可替代的角色,是关系到国民经济发展的高端核心装备[1 -7 ] .叶片是叶轮机械的关键零件,是实现工质能量转换的重要载体,其造型质量直接影响叶轮机械工作效率和性能.叶片加工过程复杂,精度要求高,必须通过精确的测量手段进行误差评定,以保证叶片制造质量[8 -9 ] .另外,叶片制造通常采用批量生产,且种类繁多,需要快捷高效的检测方式. ...
汽轮机长叶片颤振预测方法
1
2021
... 以燃气轮机为代表的叶轮机械是能源动力领域的重要设备,是大电网发电和调峰的最佳选择,在国家能源安全中扮演着无可替代的角色,是关系到国民经济发展的高端核心装备[1 -7 ] .叶片是叶轮机械的关键零件,是实现工质能量转换的重要载体,其造型质量直接影响叶轮机械工作效率和性能.叶片加工过程复杂,精度要求高,必须通过精确的测量手段进行误差评定,以保证叶片制造质量[8 -9 ] .另外,叶片制造通常采用批量生产,且种类繁多,需要快捷高效的检测方式. ...
Flutter prediction method for long blade of steam turbine
1
2021
... 以燃气轮机为代表的叶轮机械是能源动力领域的重要设备,是大电网发电和调峰的最佳选择,在国家能源安全中扮演着无可替代的角色,是关系到国民经济发展的高端核心装备[1 -7 ] .叶片是叶轮机械的关键零件,是实现工质能量转换的重要载体,其造型质量直接影响叶轮机械工作效率和性能.叶片加工过程复杂,精度要求高,必须通过精确的测量手段进行误差评定,以保证叶片制造质量[8 -9 ] .另外,叶片制造通常采用批量生产,且种类繁多,需要快捷高效的检测方式. ...
汽轮机叶片叶型测量综述
3
1995
... 当前国内常用的测量方法分为接触式和非接触式.其中,接触式测量包括标准样板测量、电感量仪测量、三坐标测量机测量,非接触式测量包括激光测量和机器视觉测量.标准样板法[10 ] 操作简单、成本低,适用于生产现场,但是测量精度和自动化程度低,需要大量的标准样板进行匹配.电感量仪[10 ] 采用传感器感应截面坐标信息,测量精度较高,环境要求低,但是成本高、通用性差,需要利用标准叶片对仪器进行校准.三坐标测量机[10 -12 ] 选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所.以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点.激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法. ...
... [10 ]采用传感器感应截面坐标信息,测量精度较高,环境要求低,但是成本高、通用性差,需要利用标准叶片对仪器进行校准.三坐标测量机[10 -12 ] 选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所.以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点.激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法. ...
... [10 -12 ]选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所.以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点.激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法. ...
Overview on profile measurement of turbine blade
3
1995
... 当前国内常用的测量方法分为接触式和非接触式.其中,接触式测量包括标准样板测量、电感量仪测量、三坐标测量机测量,非接触式测量包括激光测量和机器视觉测量.标准样板法[10 ] 操作简单、成本低,适用于生产现场,但是测量精度和自动化程度低,需要大量的标准样板进行匹配.电感量仪[10 ] 采用传感器感应截面坐标信息,测量精度较高,环境要求低,但是成本高、通用性差,需要利用标准叶片对仪器进行校准.三坐标测量机[10 -12 ] 选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所.以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点.激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法. ...
... [10 ]采用传感器感应截面坐标信息,测量精度较高,环境要求低,但是成本高、通用性差,需要利用标准叶片对仪器进行校准.三坐标测量机[10 -12 ] 选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所.以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点.激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法. ...
... [10 -12 ]选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所.以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点.激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法. ...
Study on measurement of 3D photography in aero engine vane
0
2005
航空发动机叶片型面三坐标测量机测量技术
1
2012
... 当前国内常用的测量方法分为接触式和非接触式.其中,接触式测量包括标准样板测量、电感量仪测量、三坐标测量机测量,非接触式测量包括激光测量和机器视觉测量.标准样板法[10 ] 操作简单、成本低,适用于生产现场,但是测量精度和自动化程度低,需要大量的标准样板进行匹配.电感量仪[10 ] 采用传感器感应截面坐标信息,测量精度较高,环境要求低,但是成本高、通用性差,需要利用标准叶片对仪器进行校准.三坐标测量机[10 -12 ] 选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所.以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点.激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法. ...
Measurement techniques of coordinate measuring machine for blade surface of aero-engine
1
2012
... 当前国内常用的测量方法分为接触式和非接触式.其中,接触式测量包括标准样板测量、电感量仪测量、三坐标测量机测量,非接触式测量包括激光测量和机器视觉测量.标准样板法[10 ] 操作简单、成本低,适用于生产现场,但是测量精度和自动化程度低,需要大量的标准样板进行匹配.电感量仪[10 ] 采用传感器感应截面坐标信息,测量精度较高,环境要求低,但是成本高、通用性差,需要利用标准叶片对仪器进行校准.三坐标测量机[10 -12 ] 选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所.以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点.激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法. ...
航空压气机叶片型面在线激光测量系统设计
2
2004
... 当前国内常用的测量方法分为接触式和非接触式.其中,接触式测量包括标准样板测量、电感量仪测量、三坐标测量机测量,非接触式测量包括激光测量和机器视觉测量.标准样板法[10 ] 操作简单、成本低,适用于生产现场,但是测量精度和自动化程度低,需要大量的标准样板进行匹配.电感量仪[10 ] 采用传感器感应截面坐标信息,测量精度较高,环境要求低,但是成本高、通用性差,需要利用标准叶片对仪器进行校准.三坐标测量机[10 -12 ] 选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所.以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点.激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法. ...
... 为了获取高质量的叶型图像,在进行参数测量之前需对图像进行预处理,具体包括噪声处理和特征增强,以分辨率u × v f 0 ( i , j ) i , j ) f 0 i j [16 -17 ] G ( i , j ) f G ( i , j ) 式(2) 对边缘进行增强,以获得准确、清晰的叶型图像f ( i , j ) [13 ] . ...
Design on on-line laser measurement system for vane of aero-engine compressor
2
2004
... 当前国内常用的测量方法分为接触式和非接触式.其中,接触式测量包括标准样板测量、电感量仪测量、三坐标测量机测量,非接触式测量包括激光测量和机器视觉测量.标准样板法[10 ] 操作简单、成本低,适用于生产现场,但是测量精度和自动化程度低,需要大量的标准样板进行匹配.电感量仪[10 ] 采用传感器感应截面坐标信息,测量精度较高,环境要求低,但是成本高、通用性差,需要利用标准叶片对仪器进行校准.三坐标测量机[10 -12 ] 选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所.以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点.激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法. ...
... 为了获取高质量的叶型图像,在进行参数测量之前需对图像进行预处理,具体包括噪声处理和特征增强,以分辨率u × v f 0 ( i , j ) i , j ) f 0 i j [16 -17 ] G ( i , j ) f G ( i , j ) 式(2) 对边缘进行增强,以获得准确、清晰的叶型图像f ( i , j ) [13 ] . ...
基于双目结构光的航空发动机叶片在线测量技术研究
1
2020
... 当前国内常用的测量方法分为接触式和非接触式.其中,接触式测量包括标准样板测量、电感量仪测量、三坐标测量机测量,非接触式测量包括激光测量和机器视觉测量.标准样板法[10 ] 操作简单、成本低,适用于生产现场,但是测量精度和自动化程度低,需要大量的标准样板进行匹配.电感量仪[10 ] 采用传感器感应截面坐标信息,测量精度较高,环境要求低,但是成本高、通用性差,需要利用标准叶片对仪器进行校准.三坐标测量机[10 -12 ] 选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所.以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点.激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法. ...
Research on on-line measurement technology of aero-engine blade based on binocular structure light
1
2020
... 当前国内常用的测量方法分为接触式和非接触式.其中,接触式测量包括标准样板测量、电感量仪测量、三坐标测量机测量,非接触式测量包括激光测量和机器视觉测量.标准样板法[10 ] 操作简单、成本低,适用于生产现场,但是测量精度和自动化程度低,需要大量的标准样板进行匹配.电感量仪[10 ] 采用传感器感应截面坐标信息,测量精度较高,环境要求低,但是成本高、通用性差,需要利用标准叶片对仪器进行校准.三坐标测量机[10 -12 ] 选用高精度测头获取叶片轮廓坐标值,测量精度高,但是测量效率低、价格昂贵,需要专业的测量场所.以光学测量为主的非接触测量具有自动化程度高、测量效率高的特点.激光[13 ] 和机器视觉[14 ] 测量是目前2种主要方式,二者相比,激光测量设备成本和对操作人员的要求都比较高;机器视觉测量操作简单、成本低,是实现叶片快速测量的理想方法. ...
基于计算机视觉的三维重建技术在燃气轮机行业的应用及展望
1
2021
... 本文提出的基于图像的叶型几何参数测量方法以计算机视觉为基础[15 ] ,操作简单且测量精度较高,可广泛应用于叶片检测中. ...
Computer-vision based on three-dimensional reconstruction technology and its applications in gas turbine industry
1
2021
... 本文提出的基于图像的叶型几何参数测量方法以计算机视觉为基础[15 ] ,操作简单且测量精度较高,可广泛应用于叶片检测中. ...
快速非局部均值滤波图像去噪
1
2013
... 为了获取高质量的叶型图像,在进行参数测量之前需对图像进行预处理,具体包括噪声处理和特征增强,以分辨率u × v f 0 ( i , j ) i , j ) f 0 i j [16 -17 ] G ( i , j ) f G ( i , j ) 式(2) 对边缘进行增强,以获得准确、清晰的叶型图像f ( i , j ) [13 ] . ...
Fast non-local mean for image denoising
1
2013
... 为了获取高质量的叶型图像,在进行参数测量之前需对图像进行预处理,具体包括噪声处理和特征增强,以分辨率u × v f 0 ( i , j ) i , j ) f 0 i j [16 -17 ] G ( i , j ) f G ( i , j ) 式(2) 对边缘进行增强,以获得准确、清晰的叶型图像f ( i , j ) [13 ] . ...
基于无人机图像的风力发电机叶片缺陷识别
1
2018
... 为了获取高质量的叶型图像,在进行参数测量之前需对图像进行预处理,具体包括噪声处理和特征增强,以分辨率u × v f 0 ( i , j ) i , j ) f 0 i j [16 -17 ] G ( i , j ) f G ( i , j ) 式(2) 对边缘进行增强,以获得准确、清晰的叶型图像f ( i , j ) [13 ] . ...
Defect detection of wind turbine blade based on unmanned aerial vehicle-taken images
1
2018
... 为了获取高质量的叶型图像,在进行参数测量之前需对图像进行预处理,具体包括噪声处理和特征增强,以分辨率u × v f 0 ( i , j ) i , j ) f 0 i j [16 -17 ] G ( i , j ) f G ( i , j ) 式(2) 对边缘进行增强,以获得准确、清晰的叶型图像f ( i , j ) [13 ] . ...
1
2011
... 叶型轮廓的准确提取是叶型参数精确测量的重要保证.本文首先采用Canny算子[18 ] 对叶片图像内的边缘信息进行提取.通过应用形态学图像处理方法[19 ] 的腐蚀和膨胀操作,对边缘提取后的孔洞进行填充[20 -22 ] ,以获得叶片图像中所有的边缘信息.之后,采用最大外缘轮廓法[23 -24 ] 对已提取出的所有边缘信息进行筛选,最终获得叶片外形轮廓信息,记为f c f c ∈ R m × 2 m
基于机器视觉的图像边缘检测算法研究
1
2020
... 叶型轮廓的准确提取是叶型参数精确测量的重要保证.本文首先采用Canny算子[18 ] 对叶片图像内的边缘信息进行提取.通过应用形态学图像处理方法[19 ] 的腐蚀和膨胀操作,对边缘提取后的孔洞进行填充[20 -22 ] ,以获得叶片图像中所有的边缘信息.之后,采用最大外缘轮廓法[23 -24 ] 对已提取出的所有边缘信息进行筛选,最终获得叶片外形轮廓信息,记为f c f c ∈ R m × 2 m
Research on image edge detection algorithm based on machine
1
2020
... 叶型轮廓的准确提取是叶型参数精确测量的重要保证.本文首先采用Canny算子[18 ] 对叶片图像内的边缘信息进行提取.通过应用形态学图像处理方法[19 ] 的腐蚀和膨胀操作,对边缘提取后的孔洞进行填充[20 -22 ] ,以获得叶片图像中所有的边缘信息.之后,采用最大外缘轮廓法[23 -24 ] 对已提取出的所有边缘信息进行筛选,最终获得叶片外形轮廓信息,记为f c f c ∈ R m × 2 m
1
2007
... 叶型轮廓的准确提取是叶型参数精确测量的重要保证.本文首先采用Canny算子[18 ] 对叶片图像内的边缘信息进行提取.通过应用形态学图像处理方法[19 ] 的腐蚀和膨胀操作,对边缘提取后的孔洞进行填充[20 -22 ] ,以获得叶片图像中所有的边缘信息.之后,采用最大外缘轮廓法[23 -24 ] 对已提取出的所有边缘信息进行筛选,最终获得叶片外形轮廓信息,记为f c f c ∈ R m × 2 m
1
2007
... 叶型轮廓的准确提取是叶型参数精确测量的重要保证.本文首先采用Canny算子[18 ] 对叶片图像内的边缘信息进行提取.通过应用形态学图像处理方法[19 ] 的腐蚀和膨胀操作,对边缘提取后的孔洞进行填充[20 -22 ] ,以获得叶片图像中所有的边缘信息.之后,采用最大外缘轮廓法[23 -24 ] 对已提取出的所有边缘信息进行筛选,最终获得叶片外形轮廓信息,记为f c f c ∈ R m × 2 m
二维条码图像处理算法及其VLSI设计研究
0
2013
Research on two-dimensional barcode image processing algorithm and its VLSI design
0
2013
基于数学形态学的医学图像处理理论与方法研究
1
2006
... 叶型轮廓的准确提取是叶型参数精确测量的重要保证.本文首先采用Canny算子[18 ] 对叶片图像内的边缘信息进行提取.通过应用形态学图像处理方法[19 ] 的腐蚀和膨胀操作,对边缘提取后的孔洞进行填充[20 -22 ] ,以获得叶片图像中所有的边缘信息.之后,采用最大外缘轮廓法[23 -24 ] 对已提取出的所有边缘信息进行筛选,最终获得叶片外形轮廓信息,记为f c f c ∈ R m × 2 m
Research on medical images processing theories and methods based on mathematical morphology
1
2006
... 叶型轮廓的准确提取是叶型参数精确测量的重要保证.本文首先采用Canny算子[18 ] 对叶片图像内的边缘信息进行提取.通过应用形态学图像处理方法[19 ] 的腐蚀和膨胀操作,对边缘提取后的孔洞进行填充[20 -22 ] ,以获得叶片图像中所有的边缘信息.之后,采用最大外缘轮廓法[23 -24 ] 对已提取出的所有边缘信息进行筛选,最终获得叶片外形轮廓信息,记为f c f c ∈ R m × 2 m
Topological structural analysis of digitized binary images by border following
1
1985
... 叶型轮廓的准确提取是叶型参数精确测量的重要保证.本文首先采用Canny算子[18 ] 对叶片图像内的边缘信息进行提取.通过应用形态学图像处理方法[19 ] 的腐蚀和膨胀操作,对边缘提取后的孔洞进行填充[20 -22 ] ,以获得叶片图像中所有的边缘信息.之后,采用最大外缘轮廓法[23 -24 ] 对已提取出的所有边缘信息进行筛选,最终获得叶片外形轮廓信息,记为f c f c ∈ R m × 2 m
Implementation and advanced results on the non-interrupted skeletonization algorithm
1
2001
... 叶型轮廓的准确提取是叶型参数精确测量的重要保证.本文首先采用Canny算子[18 ] 对叶片图像内的边缘信息进行提取.通过应用形态学图像处理方法[19 ] 的腐蚀和膨胀操作,对边缘提取后的孔洞进行填充[20 -22 ] ,以获得叶片图像中所有的边缘信息.之后,采用最大外缘轮廓法[23 -24 ] 对已提取出的所有边缘信息进行筛选,最终获得叶片外形轮廓信息,记为f c f c ∈ R m × 2 m
一种透平钻具叶片叶型参数化设计方法
1
2015
... 叶型参数[25 ] 如图3 所示,定义轴线方向为x 轴,额线方向为y 轴.图3 中,O f ( O f , x , O f , y ) O r ( O r , x , O r , y ) R f R r L x 轴向距离.叶片中弧线记为O f O r ̑ α f α r x 轴的夹角,记为几何入口角和几何出口角;O m a x R m a x P m a x O f O m a x x 轴向距离;T y 值点位置;T m a x T x 轴向距离. ...
A Method of parametric design for turbine drill blade profile
1
2015
... 叶型参数[25 ] 如图3 所示,定义轴线方向为x 轴,额线方向为y 轴.图3 中,O f ( O f , x , O f , y ) O r ( O r , x , O r , y ) R f R r L x 轴向距离.叶片中弧线记为O f O r ̑ α f α r x 轴的夹角,记为几何入口角和几何出口角;O m a x R m a x P m a x O f O m a x x 轴向距离;T y 值点位置;T m a x T x 轴向距离. ...
航空发动机叶片截面特征参数检测
1
2016
... 令f c , k ∈ f c k ∈ m ],(x k , y k ) 为f c k R f R r R m a x [26 ] 为 ...
Inspection of aero engine blade cross-sectional feature parameters
1
2016
... 令f c , k ∈ f c k ∈ m ],(x k , y k ) 为f c k R f R r R m a x [26 ] 为 ...
基于凸组合的列文伯格-马夸尔特算法
1
2019
... 式中初始叶型H 0 P 0 [27 ] 迭代求解. ...
A Levenberg-Marquardt algorithm based on convex combination
1
2019
... 式中初始叶型H 0 P 0 [27 ] 迭代求解. ...











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}